栅格地图基本元素
- 分辨率
- 坐标系
- 占用率
分辨率
指一个网格能表示现实世界的距离长短
eg:一个(10米,10米)的点,转移到地图中是(10/0.05,10/0.05)=(20,20),分辨率为:0.05米/每网格
坐标系
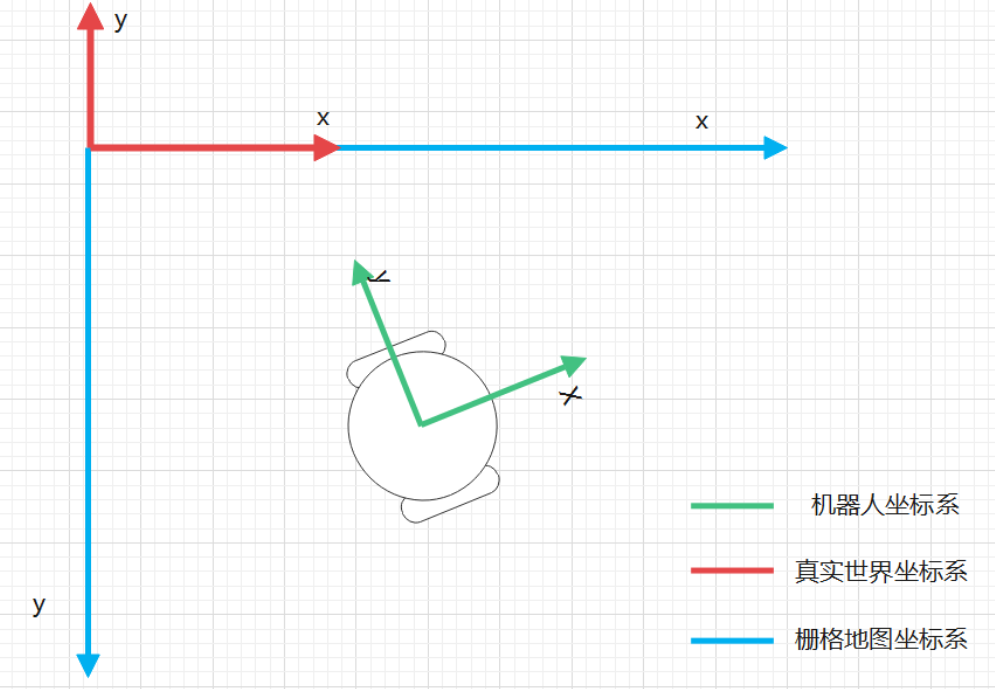
可见真实世界坐标系和机器人坐标系的y yy轴都是在x xx轴的左侧,而栅格地图坐标系y yy轴在x xx轴的右侧,是典型的像素坐标系。
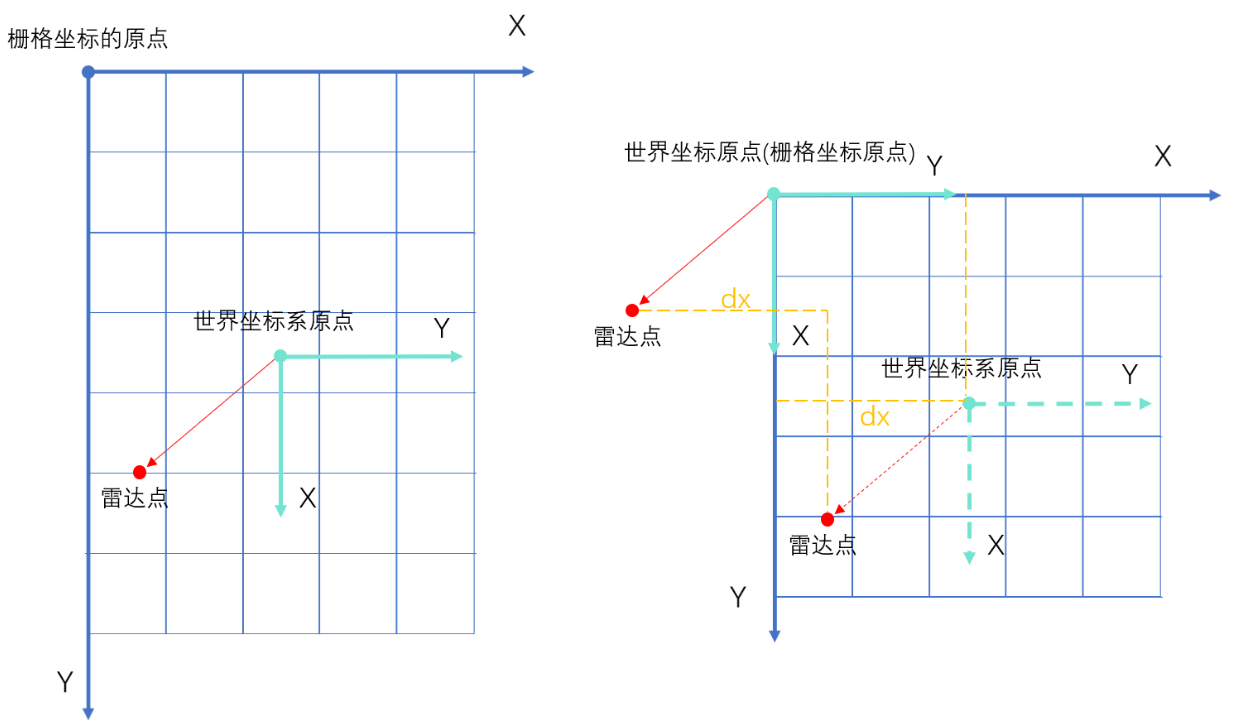
注意这里世界坐标系和栅格地图坐标系的原点不一定是重合的
eg:在HectorSLAM中采用栅格地图的中点作为真实世界坐标的(0,0)点,这样的好处是,真实距离为负数(-2,-10)的点也能很好的储存在栅格地图中,只需要加上真实世界坐标系相对于栅格地图坐标系的平移就行。
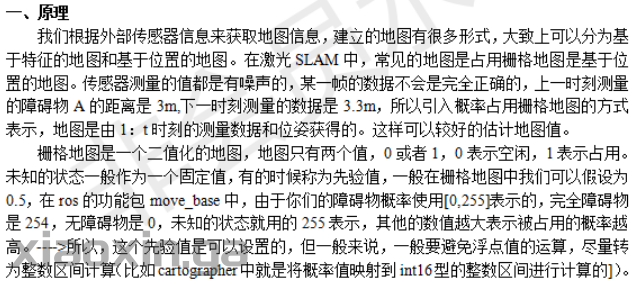
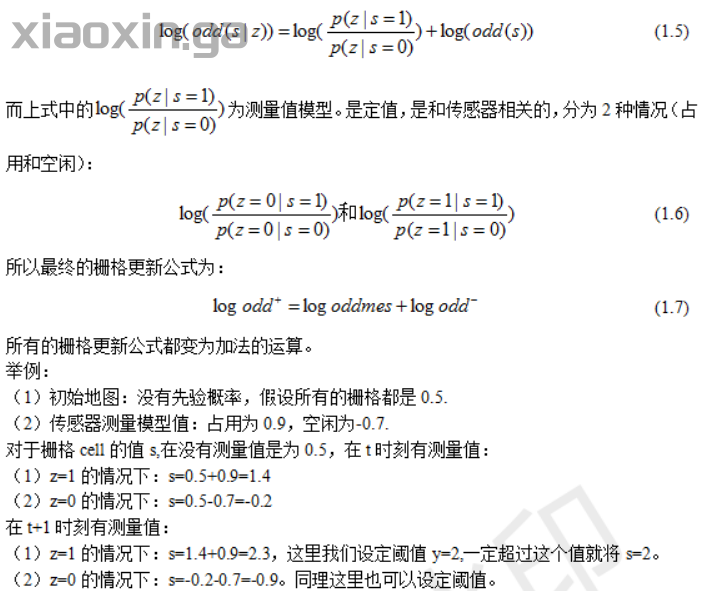
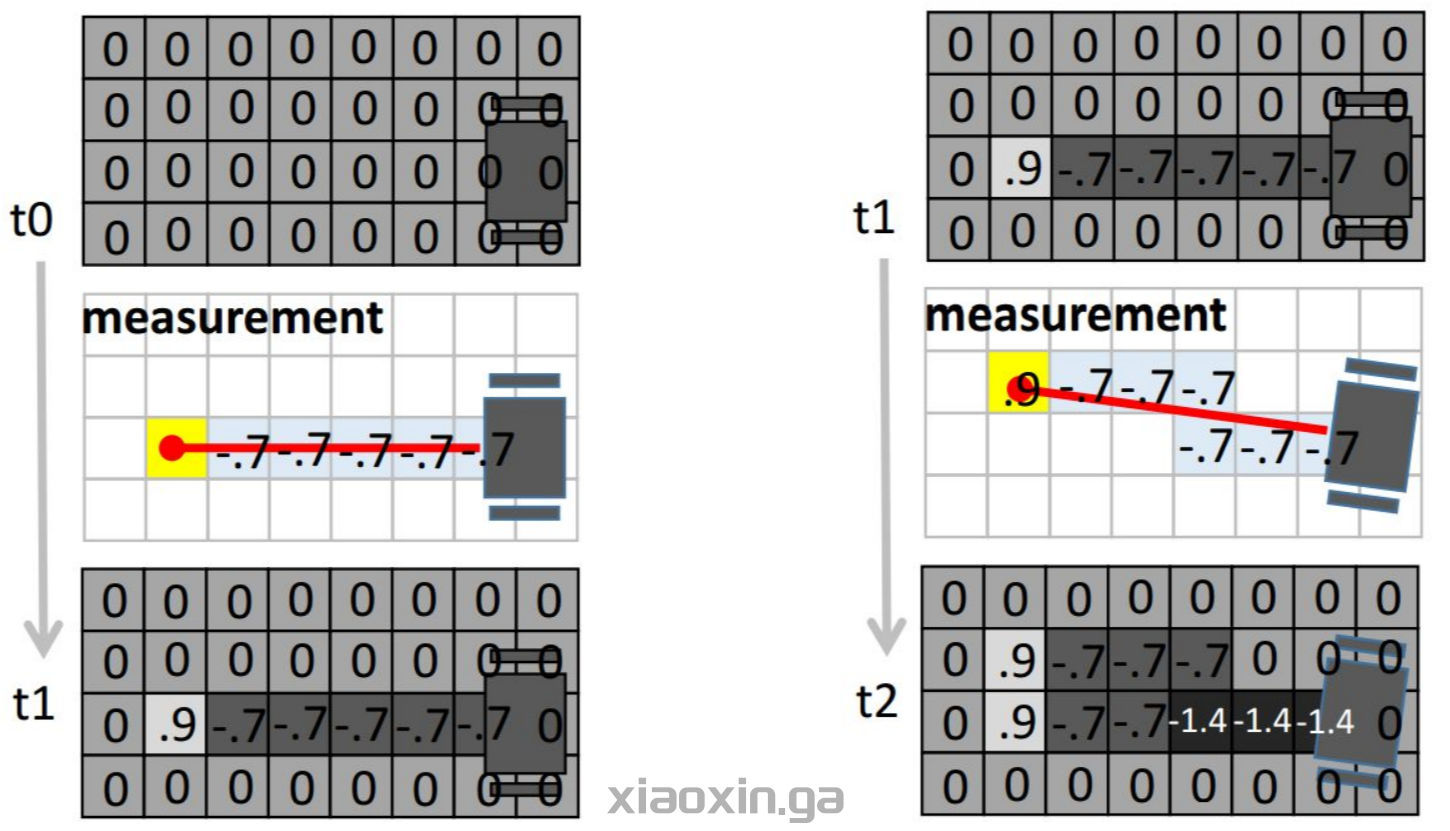
原理
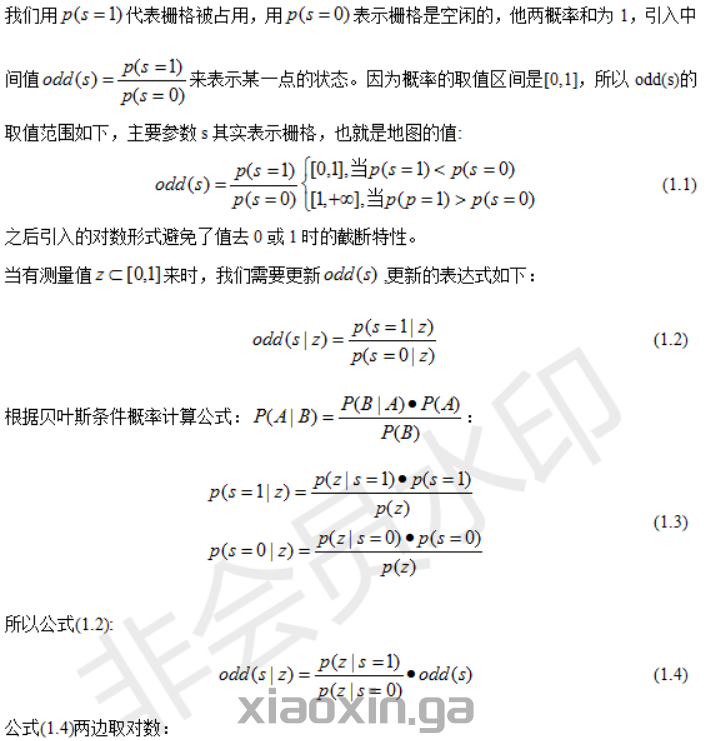
快速推导
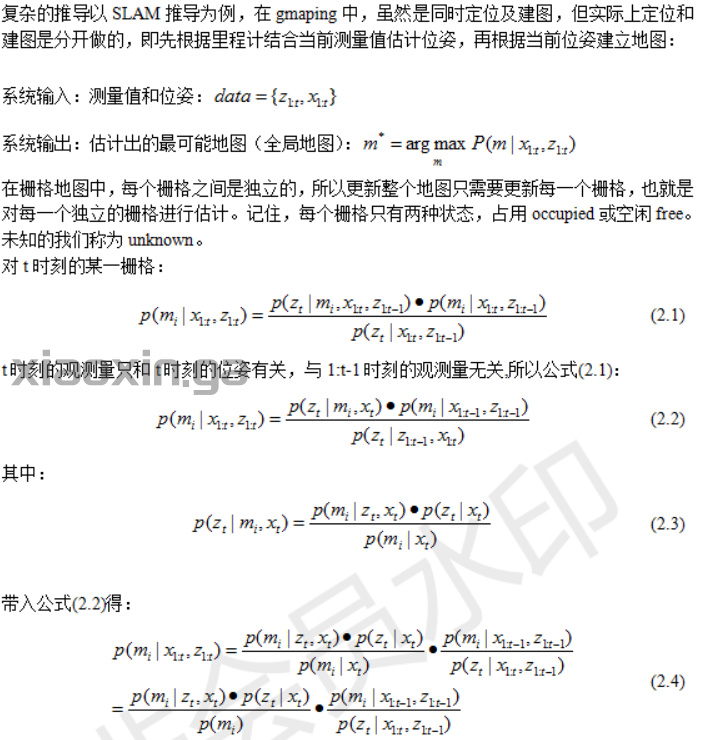
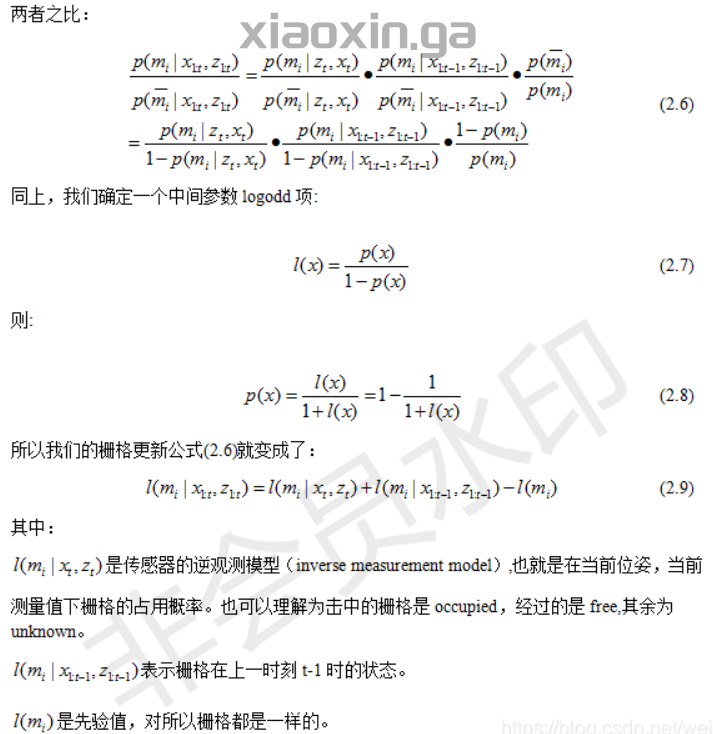
复杂推导

此处评论已关闭