Loading...
gmapping简介 gmapping 是ROS开源社区中较为常用且比较成熟的SLAM算法之一,gmap...
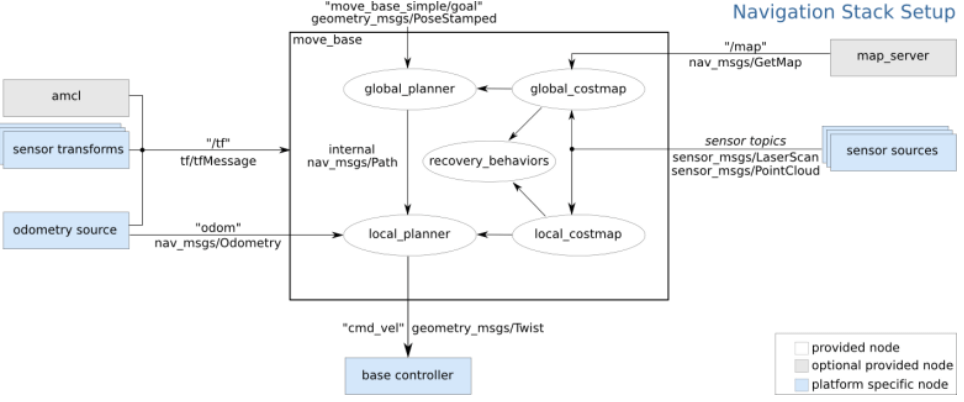
简介 机器人是如何实现导航的呢?或换言之,机器人是如何从 A 点移动到 B 点呢?ROS 官方为了提供了...