基本流程
安装 Arbotix
创建新功能包,准备机器人 urdf、xacro 文件
添加 Arbotix 配置文件
编写 launch 文件配置 Arbotix
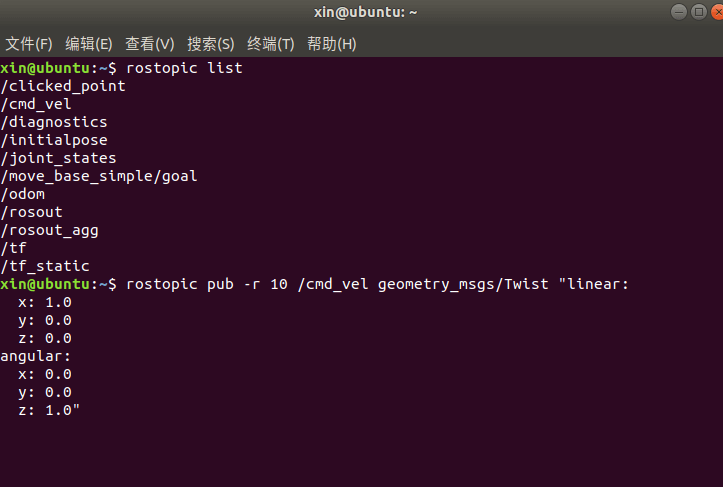
启动 launch 文件并控制机器人模型运动
安装 Arbotix
命令行调用
sudo apt-get install ros-<<VersionName()>>-arbotix
源码安装
先从 github 下载源码,下载到工程目录(与build目录同级)下,然后调用 catkin_make 编译
git clone https://github.com/vanadiumlabs/arbotix_ros.git
添加配置文件
添加 arbotix 所需配置文件
# 该文件是控制器配置,一个机器人模型可能有多个控制器,比如: 底盘、机械臂、夹持器(机械手)....
# 因此,根 name 是 controller
controllers: {
# 单控制器设置
base_controller: {
#类型: 差速控制器
type: diff_controller,
#参考坐标
base_frame_id: base_footprint,
#两个轮子之间的间距
base_width: 0.2,
#控制频率
ticks_meter: 2000,
#PID控制参数,使机器人车轮快速达到预期速度
Kp: 12,
Kd: 12,
Ki: 0,
Ko: 50,
#加速限制
accel_limit: 1.0
}
}