简介
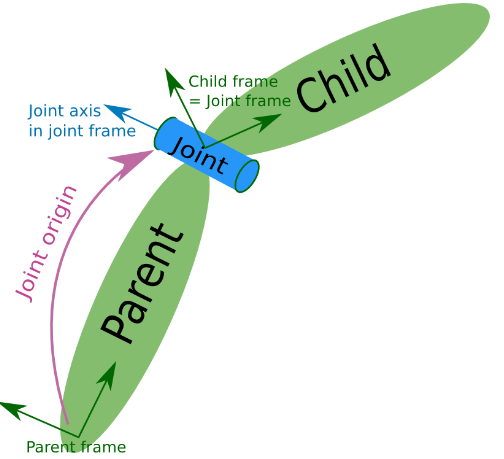
urdf 中的 joint 标签用于描述机器人关节的运动学和动力学属性,还可以指定关节运动的安全极限,机器人的两个部件(分别称之为 parent link 与 child link)以"关节"的形式相连接,不同的关节有不同的运动形式: 旋转、滑动、固定、旋转速度、旋转角度限制....,比如:安装在底座上的轮子可以360度旋转,而摄像头则可能是完全固定在底座上
属性
name ---> 为关节命名
type ---> 关节运动形式
continuous: 旋转关节,可以绕单轴无限旋转
revolute: 旋转关节,类似于 continues,但是有旋转角度限制
prismatic: 滑动关节,沿某一轴线移动的关节,有位置极限
planer: 平面关节,允许在平面正交方向上平移或旋转
floating: 浮动关节,允许进行平移、旋转运动
fixed: 固定关节,不允许运动的特殊关节
子标签
parent(必需的) parent link的名字是一个强制的属性: link:父级连杆的名字,是这个link在机器人结构树中的名字。
child(必需的) child link的名字是一个强制的属性: link:子级连杆的名字,是这个link在机器人结构树中的名字。
origin 属性: xyz=各轴线上的偏移量 rpy=各轴线上的偏移弧度。
axis 属性: xyz用于设置围绕哪个关节轴运动。
实现过程
创建功能包
编写URDF文件
<link name="camera">
<visual>
<geometry>
<box size="0.02 0.05 0.05" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="red">
<color rgba="1 0 0 0.5" />
</material>
</visual>
</link>
<joint name="camera2baselink" type="continuous">
<parent link="base_link"/>
<child link="camera" />
<origin xyz="0.2 0 0.075" rpy="0 0 0" />
<axis xyz="0 0 1" />
</joint>
</robot>
编写launch文件
<launch>
<param name="robot_description" textfile="$(find urdf_demo01)/urdf/urdf/urdf_demo01_joint.urdf" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdf_demo01)/config/show_mycar.rviz" />
<!--
只有上述两句语句:
表现:设置头显示位置与颜色异常
提示:No transform from [camera] to [base_link] 缺少camera到base_link的坐标关系转换
原因:rviz中显示URDF时,必须发布不同部件之间 坐标系 关系
解决:ROS中提供了关于机器人模型显示的坐标发布相关节点(两个)
-->
<!-- 添加关节状态发布节点 -->
<node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" />
<!-- 添加机器人状态发布节点 -->
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" />
<!-- 可选:用于控制关节运动的节点 -->
<node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" />
</launch>
启动launch文件
source ./devel/setup.bash
roslaunch urdf_demo01 urdf_demo01_joint.launch
launch文件分解
状态发布节点(必要)
<!-- 添加关节状态发布节点 -->
<node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" />
<!-- 添加机器人状态发布节点 -->
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" />
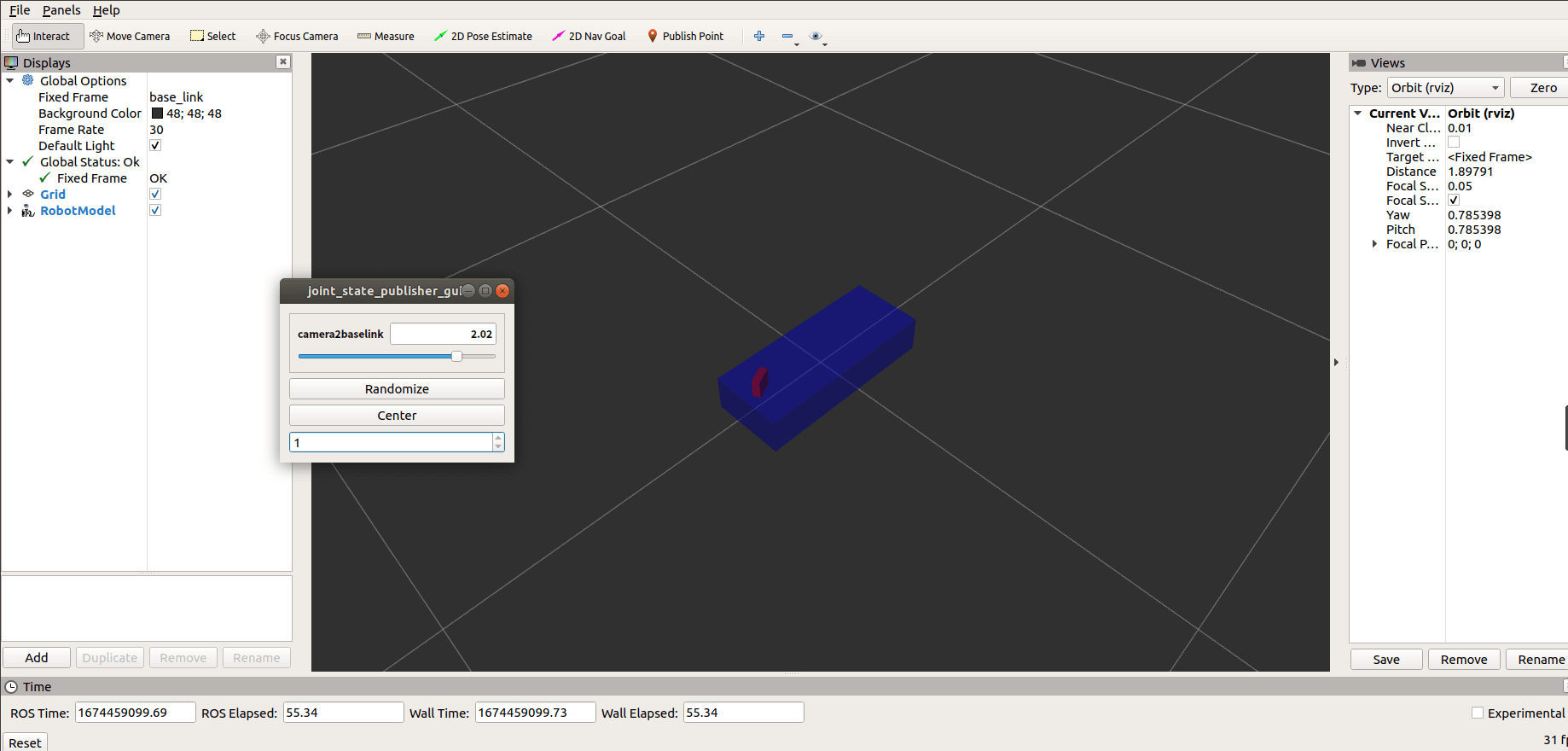
关节运动控制节点(可选)
<!-- 可选:用于控制关节运动的节点 -->
<node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" />
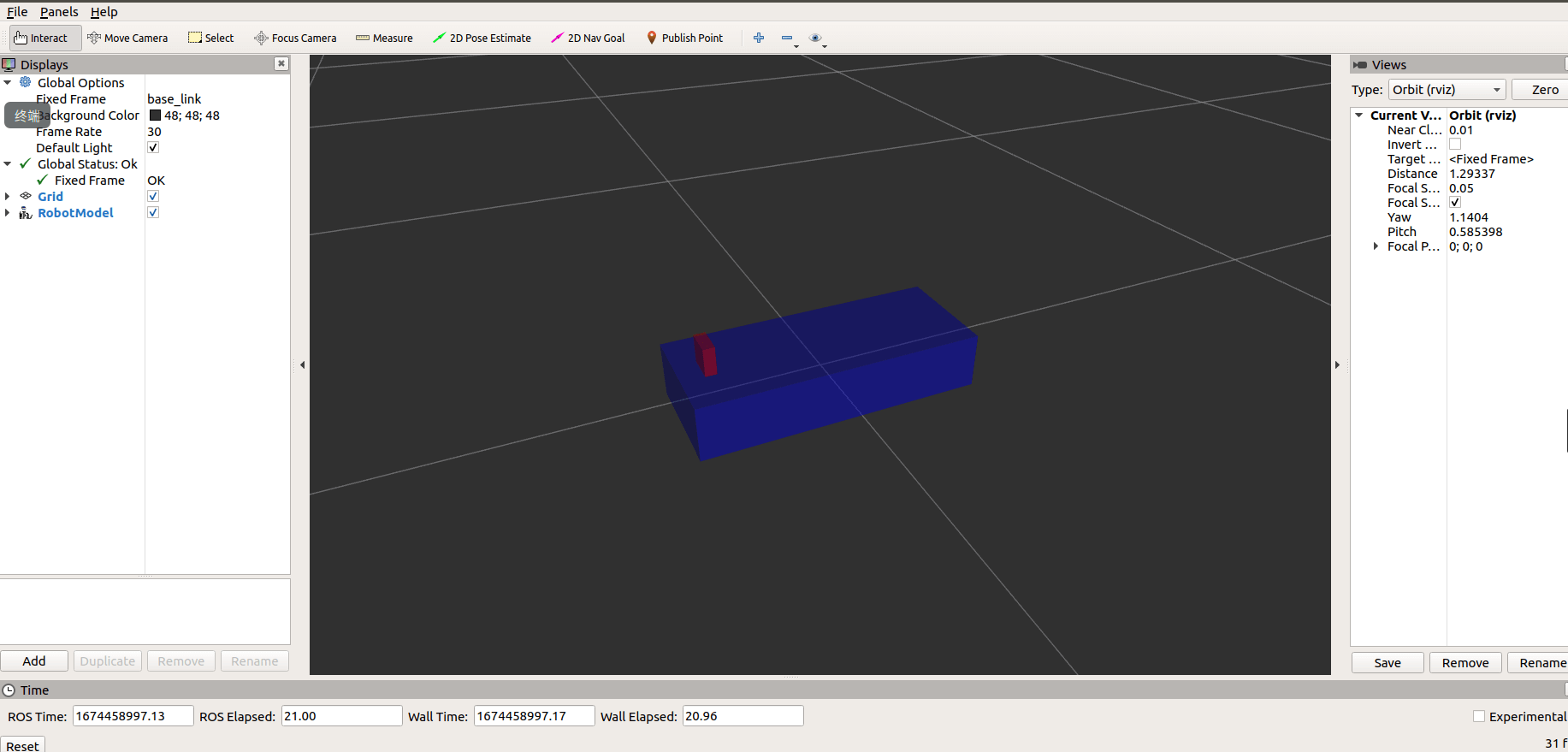
实验现象
base_footprint优化urdf
简介
前面实现的机器人模型是半沉到地下的,因为默认情况下: 底盘的中心点位于地图原点上,所以会导致这种情况产生,可以使用的优化策略,将初始 link 设置为一个尺寸极小的 link(比如半径为 0.001m 的球体,或边长为 0.001m 的立方体),然后再在初始 link 上添加底盘等刚体,这样实现,虽然仍然存在初始link半沉的现象,但是基本可以忽略了。这个初始 link 一般称之为 base_footprint
优化URDF文件
<!--
使用 base_footprint 优化
-->
<robot name="mycar">
<!-- 设置一个原点(机器人中心点的投影) -->
<link name="base_footprint">
<visual>
<geometry>
<sphere radius="0.001" />
</geometry>
</visual>
</link>
<!-- 添加底盘 -->
<link name="base_link">
<visual>
<geometry>
<box size="0.5 0.2 0.1" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="blue">
<color rgba="0 0 1.0 0.5" />
</material>
</visual>
</link>
<!-- 底盘与原点连接的关节 -->
<joint name="base_link2base_footprint" type="fixed">
<parent link="base_footprint" />
<child link="base_link" />
<origin xyz="0 0 0.05" />
</joint>
<!-- 添加摄像头 -->
<link name="camera">
<visual>
<geometry>
<box size="0.02 0.05 0.05" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="red">
<color rgba="1 0 0 0.5" />
</material>
</visual>
</link>
<!-- 关节 -->
<joint name="camera2baselink" type="continuous">
<parent link="base_link"/>
<child link="camera" />
<origin xyz="0.2 0 0.075" rpy="0 0 0" />
<axis xyz="0 0 1" />
</joint>
</robot>
优化后现象
会在地盘底部添加一个小的模型,从而防止地盘下陷
