新建功能包
新建C++文件
参数配置
nh节点方式
ros::NodeHandle nh;
nh.setParam(参数);
param方式
ros::param::set(参数);
实现函数
#include "ros/ros.h"
int main(int argc, char *argv[])
{
//初始化ros
ros::init(argc,argv,"robot");
//创建句柄
ros::NodeHandle nh;
/* 1.句柄实现
ros::NodeHandle*/
nh.setParam("type","xiaohei");
nh.setParam("R",0.15);
/* 2.参数实现
ros::param::set();*/
ros::param::set("type_param","xiaobai");
ros::param::set("R_param",0.15);
return 0;
}
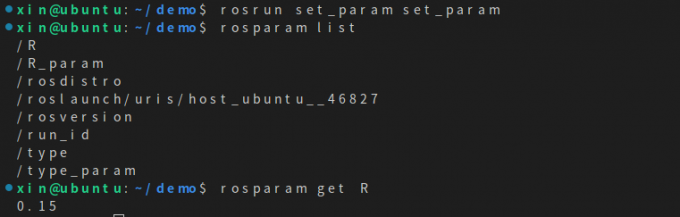
实验现象
rosparam list
rosparam get xxx
参数修改
只需要重新对参数进行赋值
