基本流程
编写一个单独的 xacro 文件,为机器人模型添加雷达配置
文件集成进xacro文件
启动 Gazebo,使用 Rviz 显示雷达信息
实现流程
雷达xacro编写
<robot name="my_sensors" xmlns:xacro="http://wiki.ros.org/xacro">
<!-- 雷达 -->
<gazebo reference="lidar">
<sensor type="ray" name="rplidar">
<pose>0 0 0 0 0 0</pose>
<visualize>true</visualize>
<update_rate>5.5</update_rate>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1</resolution>
<min_angle>-3</min_angle>
<max_angle>3</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>30.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="gazebo_rplidar" filename="libgazebo_ros_laser.so">
<topicName>/scan</topicName>
<frameName>lidar</frameName>
</plugin>
</sensor>
</gazebo>
</robot>
xacro 文件集成
<!-- 组合小车底盘与传感器 -->
<robot name="my_car_camera" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:include filename="my_head.urdf.xacro" />
<xacro:include filename="my_base.urdf.xacro" />
<xacro:include filename="my_camera.urdf.xacro" />
<xacro:include filename="my_laser.urdf.xacro" />
<xacro:include filename="move.urdf.xacro" />
<!-- 雷达仿真的 xacro 文件 -->
<xacro:include filename="my_sensors_laser.urdf.xacro" />
</robot>
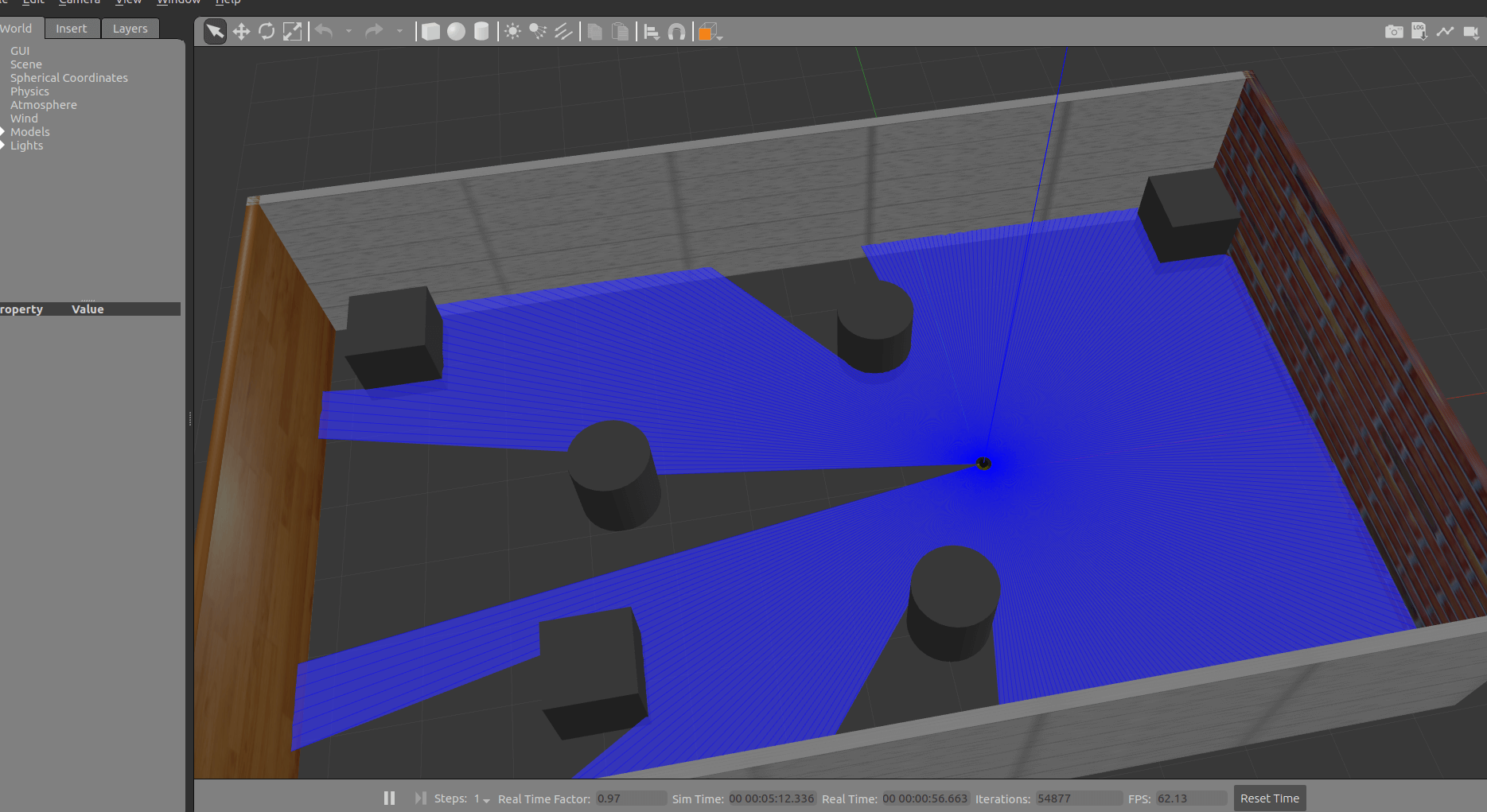
启动仿真环境
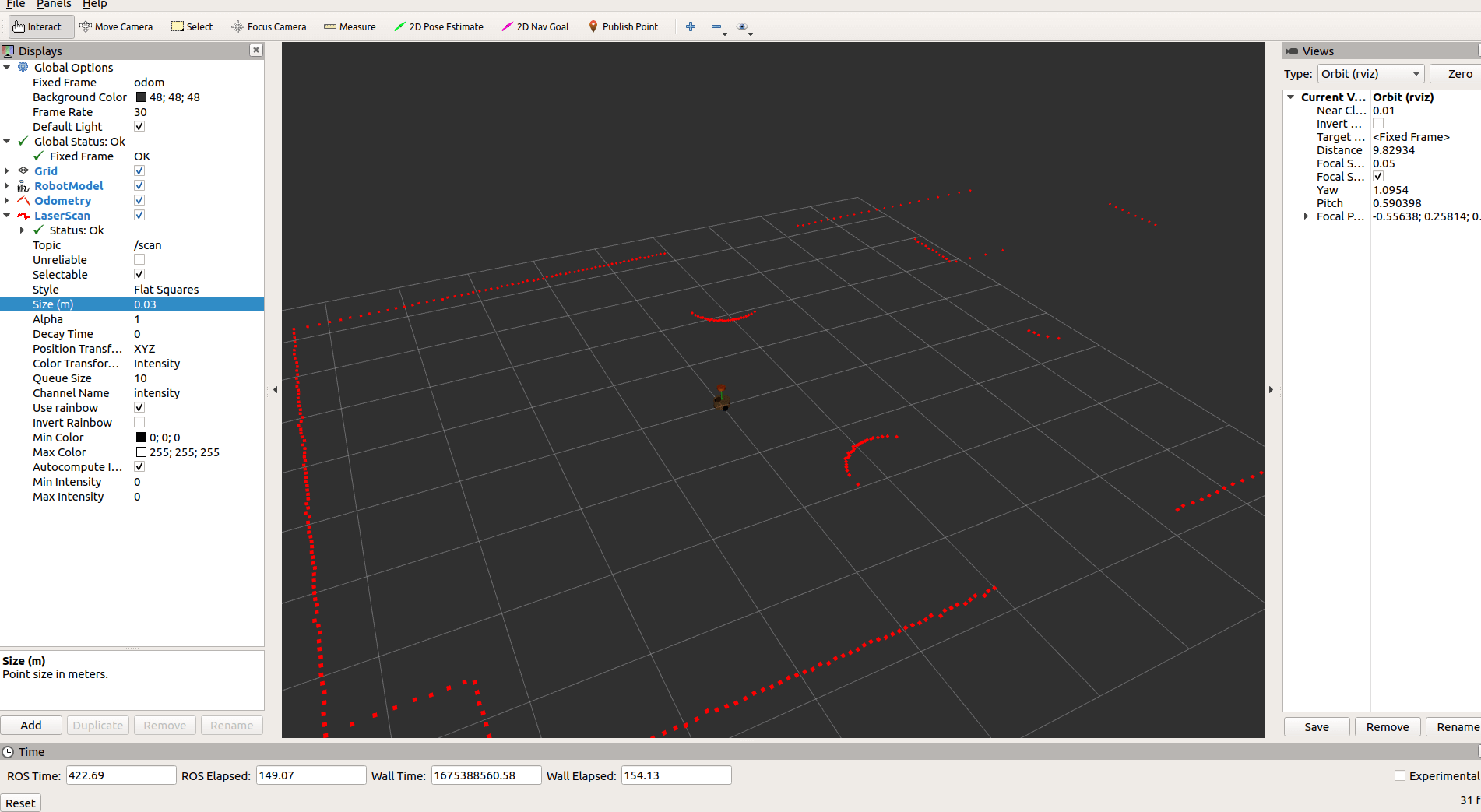
启动Rviz
最终现象
gazebo
Rviz