雷达简介
包含套件
- 雷达模组(内置pwm电机驱动)
- usb适配器
- Micro-USB线缆
- 电源线

接线方式

ps:雷达不需额外的电源供电,直接使用电脑USB接口,5V供电
驱动安装
USB 适配器采用 CP2102 芯片实现串口(UART)至 USB 信号的转换。因此需要在PC 系统中安装对应的驱动程序。其驱动程序可以在配套的 SDK 包中找到,或者从 Silicon Labs 的官方网站中下载。
SDK安装地址:Slamtec/rplidar_sdk: Open source SDK for Slamtec RPLIDAR series products (github.com)
ROS功能包:Slamtec/rplidar_ros (github.com)
CP2102 驱动:CP210x USB 转 UART 桥接 VCP 驱动程序 - 硅实验室 (silabs.com)
win驱动安装这里不再演示。ubuntu驱动安装参考:ubuntu安装cp210x驱动详细教程 - 镜花 (xiaoxin.ga)
win11安装win10驱动即可
win驱动雷达
雷达驱动软件安装
下载地址:RoboStudio可扩展的机器人管理与开发软件|思岚科技(SLAMTEC)
###基本流程
- 下载软件安装包
- 注册账号并登录
- 将雷达连接至PC
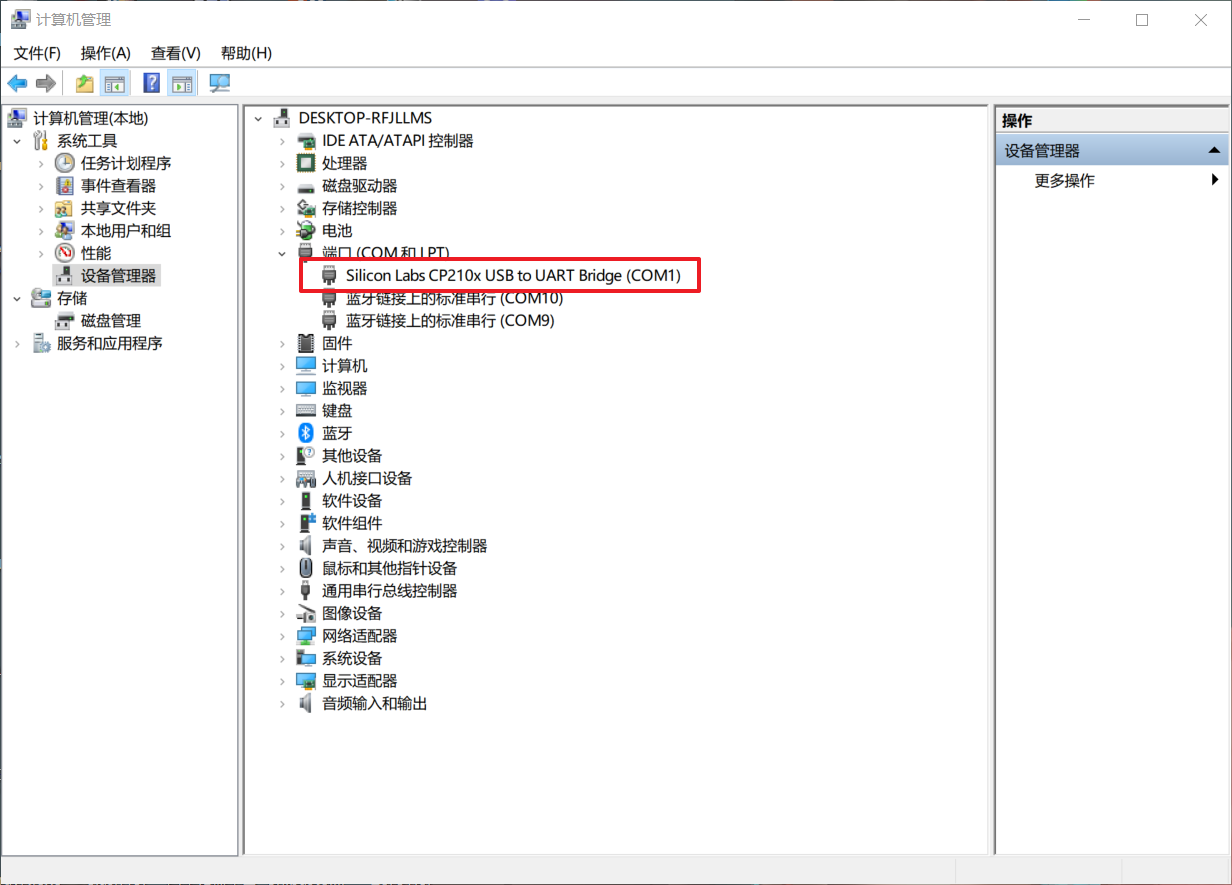
- 检查电脑是否识别雷达
- 手动连接雷达
这里主要讲解雷达连接过程,因为本人雷达刚拿到手的时候就卡在这里。
雷达连接详细过程
首先检查雷达是否识别
连接雷达
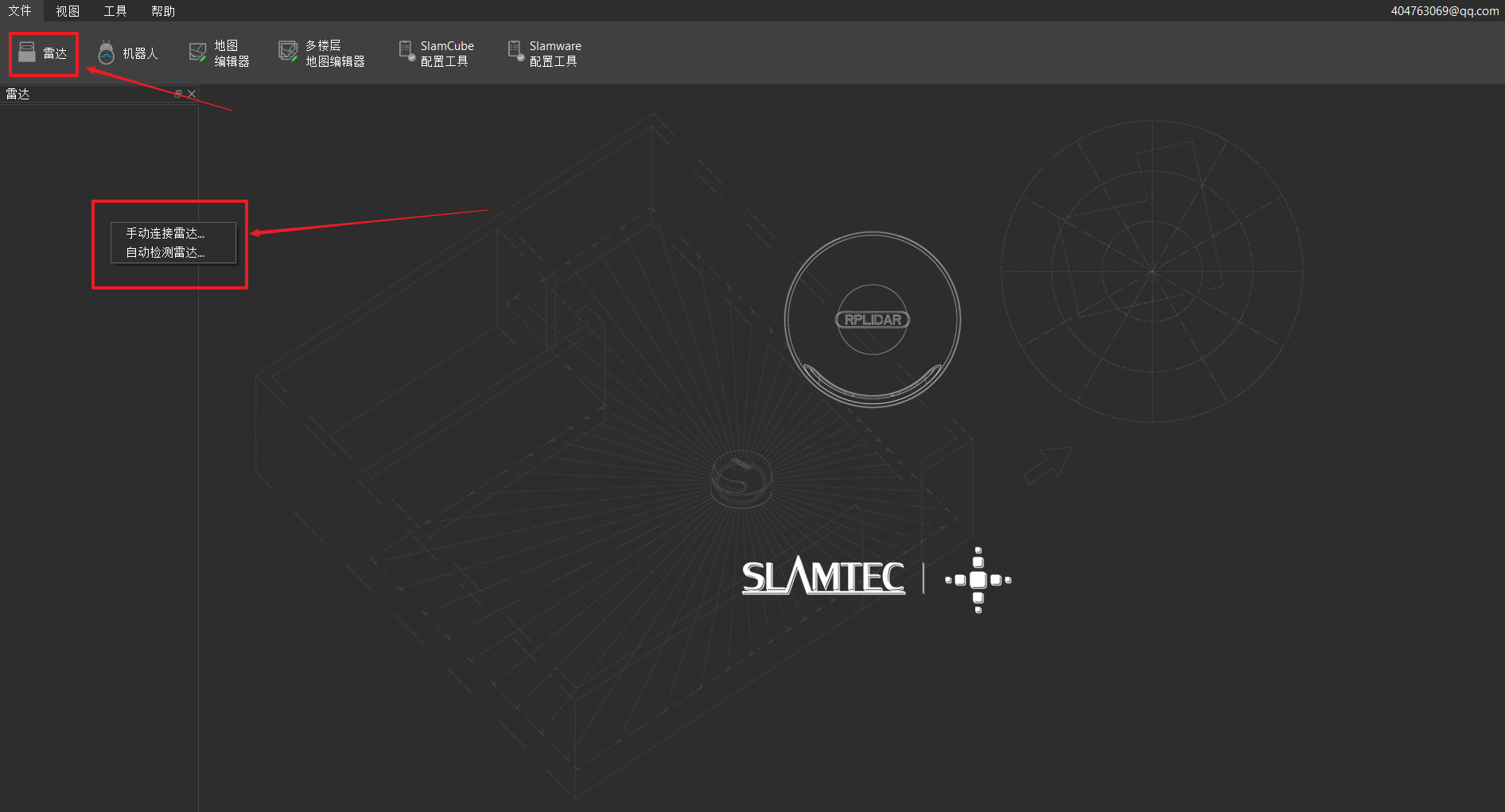
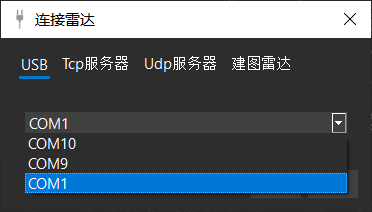
打开软件后,点击雷达选项卡,接着右键选中手动连接雷达,选中雷达的端口
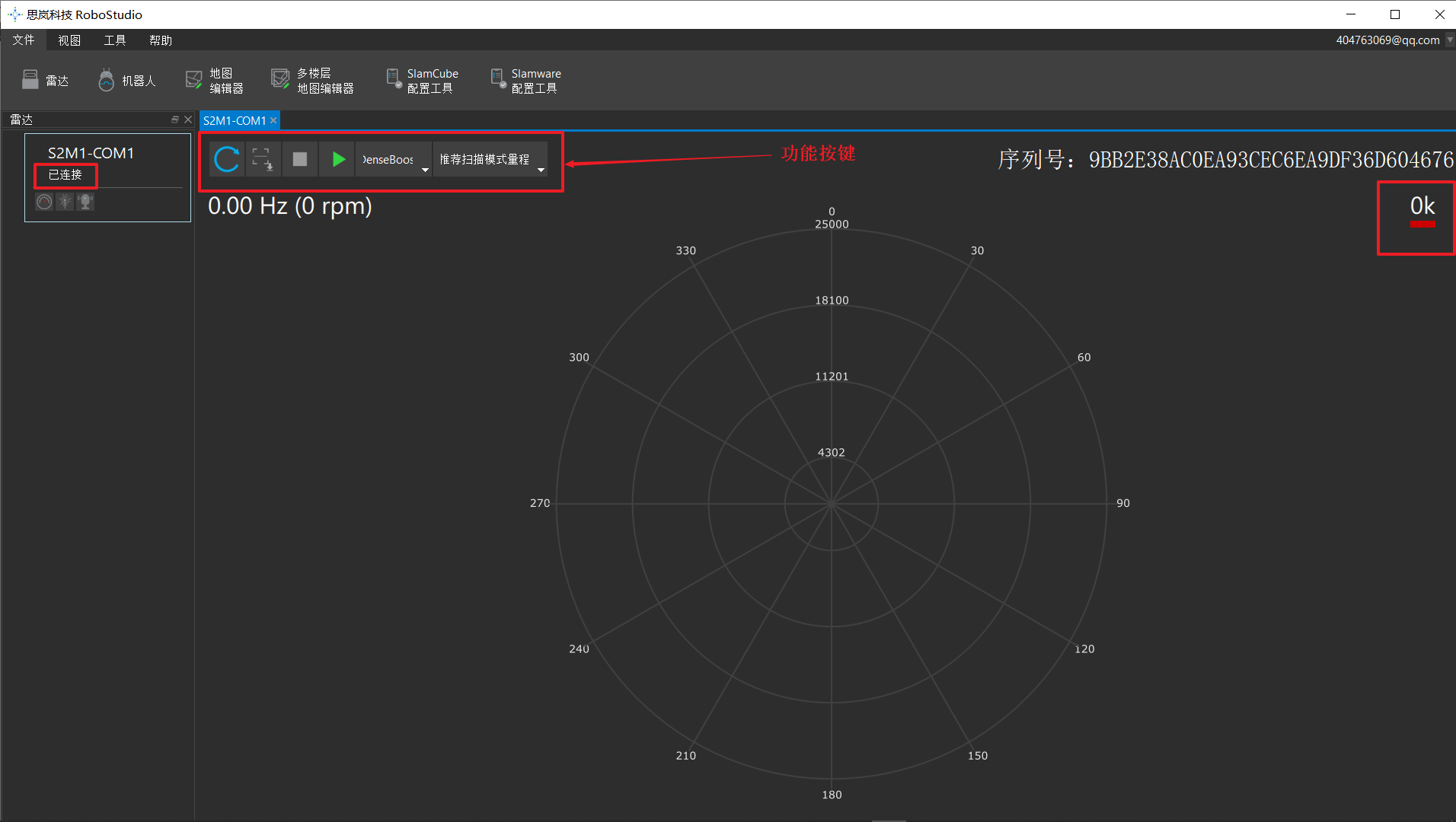
点击绿色三角形启动雷达
ubuntu驱动雷达
新建功能包
mkdir -p catkin_ws/src
将雷达功能包导入src文件夹内
编译功能包
cd catkin_ws
catkin_make
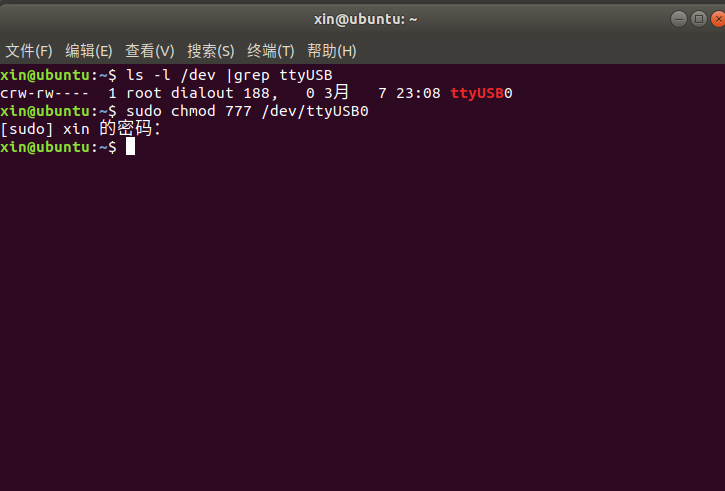
连接雷达
ls -l /dev |grep ttyUSB
sudo chmod 777 /dev/ttyUSB0
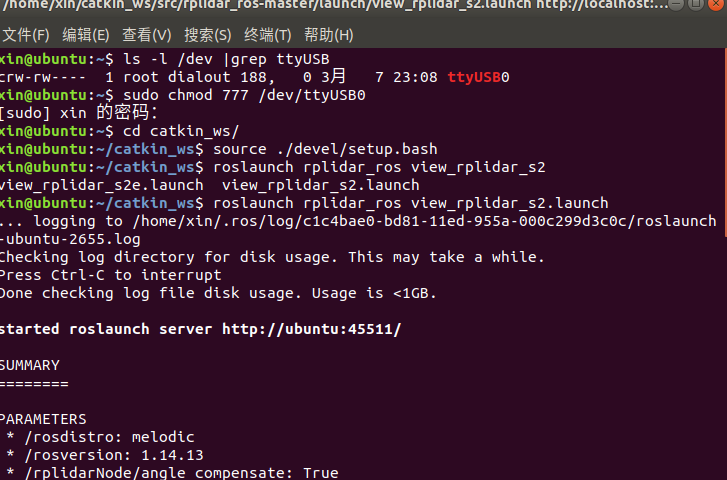
启动思岚雷达测试文件
cd catkin_ws
source ./devel/setup.bash
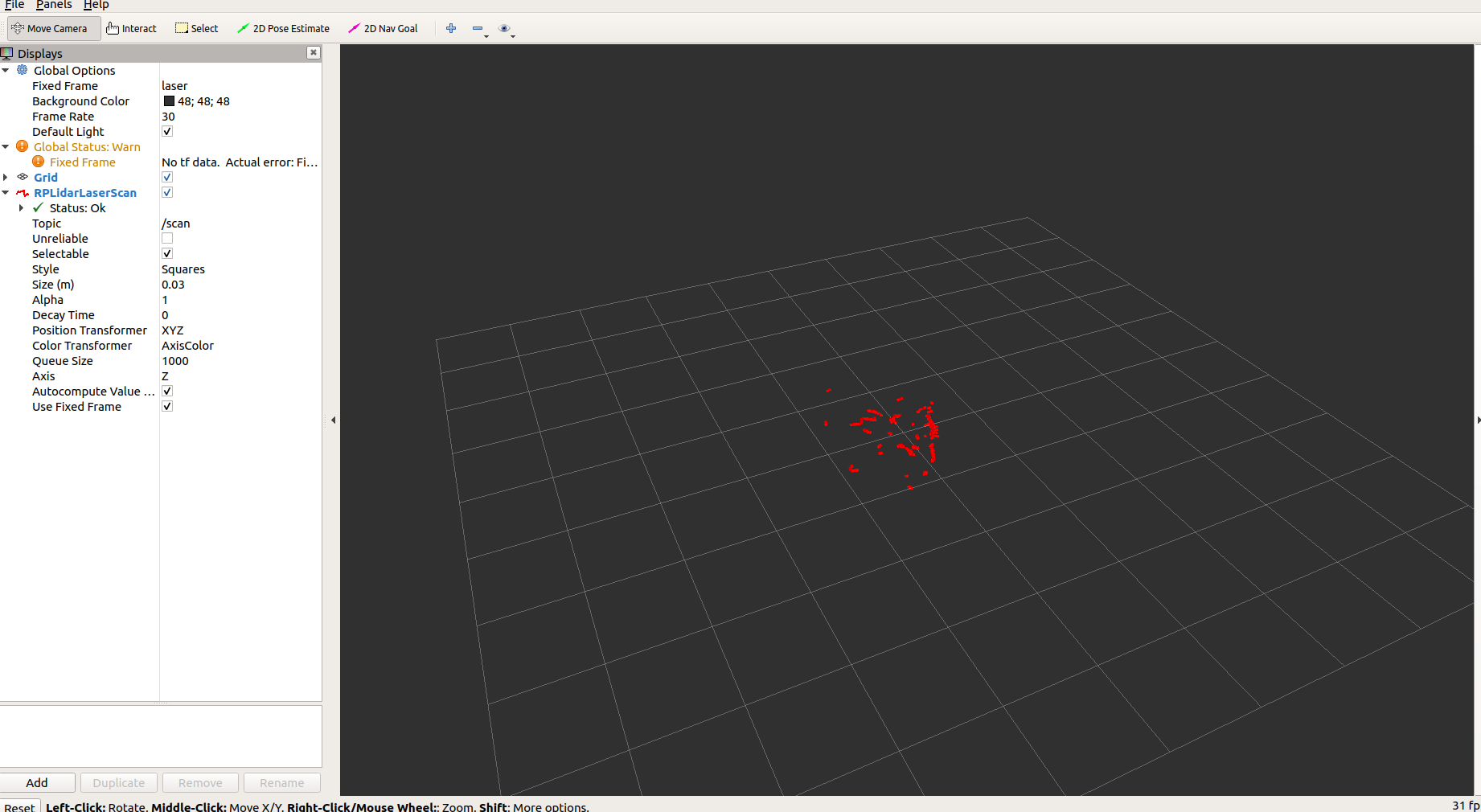
roslaunch rplidar_ros view_rplidar_s2.launch
ps:我的雷达是思岚雷达的S2型号,按照自己的型号选择即可!
遇到的问题
安装win版雷达软件过程中报错
解决方法
直接点击忽略即可,不影响雷达的连接

此处评论已关闭