Loading...
简介 使用 Xacro 优化 URDF 版的小车底盘模型实现 xacro优化代码 <!-- ...
简介 使用xacro优化上一节案例中驱动轮实现,需要使用变量封装底盘的半径、高度,使用数学公式动态计算底...
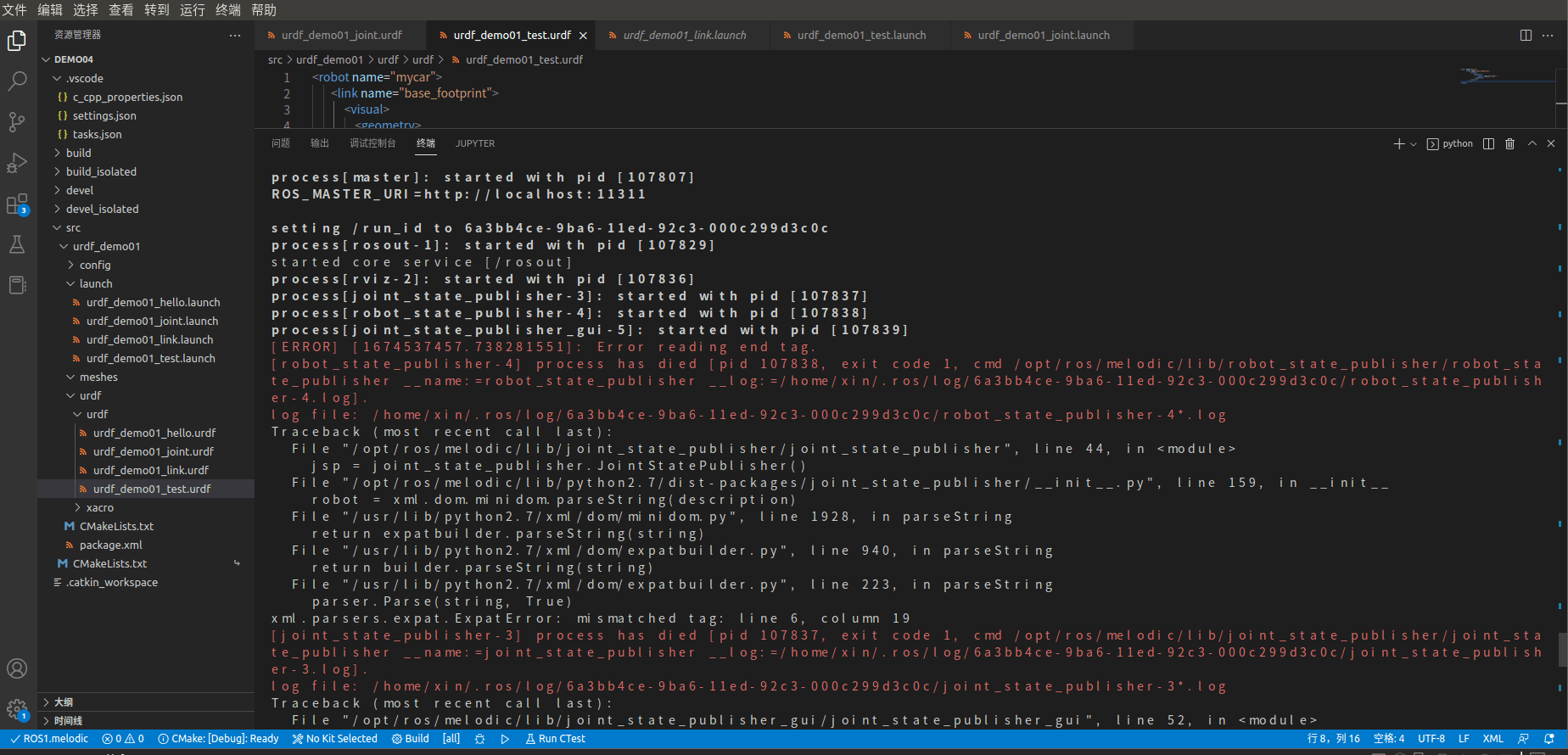
报错1 命令行输出如下错误提示 UnicodeEncodeError: 'ascii' codec c...