Loading...
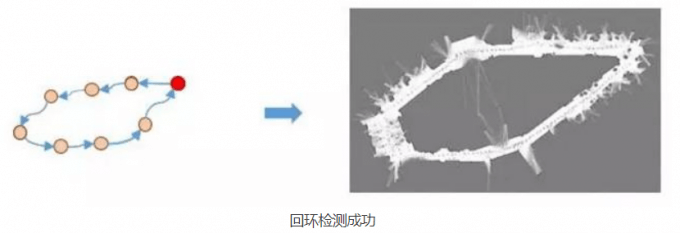
回环检测,又称闭环检测,是指机器人识别曾到达某场景,使得地图闭环的能力。说的简单点,就是机器人在左转一下...
基于滤波的SLAM主要经历了卡尔曼滤波器(Kalman Filter, KF)、粒子滤波(Particl...
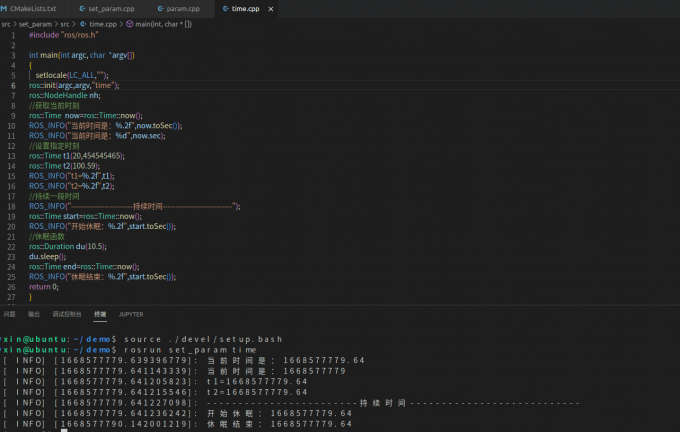
初始化函数 作用:初始化函数 ros::init(argc,argv,"节点名"...