简介
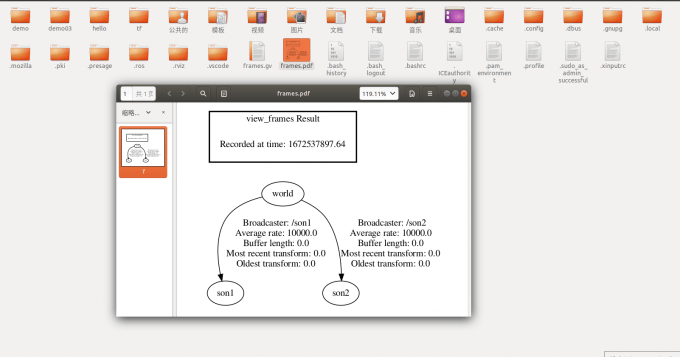
在机器人系统中,涉及的坐标系有多个,为了方便查看,ros 提供了专门的工具,可以用于生成显示坐标系关系的 pdf 文件,该文件包含树形结构的坐标系图谱。
基本步骤
tf2_tools会在执行命令的路径上生成坐标关系的pdf文件
查看是否安装工具包
rospack find tf2_tools
查看安装ros版本
//启动ros
roscore
//查看ros版本
rosparam get /rosdistro
安装tf2_tools
sudo apt install ros-你的版本-tf2-tools
生成 pdf 文件
rosrun tf2_tools view_frames.py