简介
ROS 内置的乌龟案例并操作,操作过程中使用 rosbag 录制,录制结束后,实现重放
操作过程
创建录制文件目录
//创建xxx目录
//mkdir xxx
mkdir bags
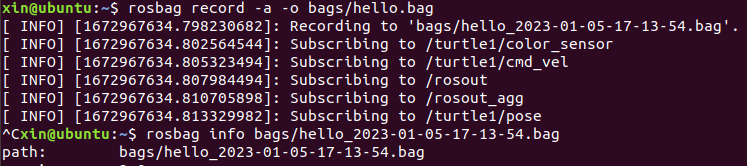
开始录制
//rosbag record -a -o 路径/文件名
rosbag record -a -o bags/hello.bag
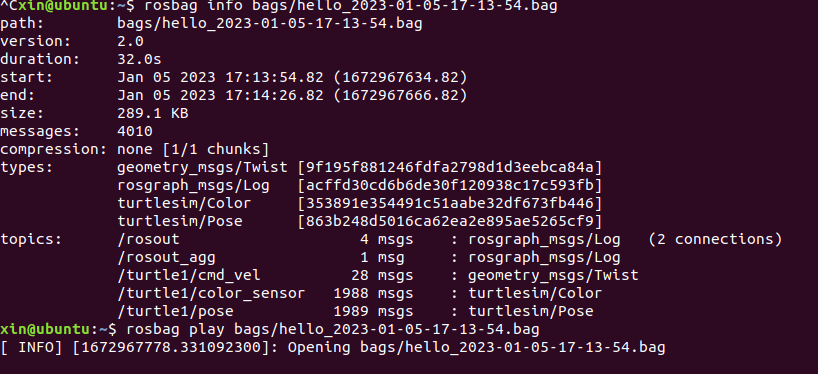
查看录制文件基本信息
//rosbag info 路径/文件名
rosbag info bags/hello.bag
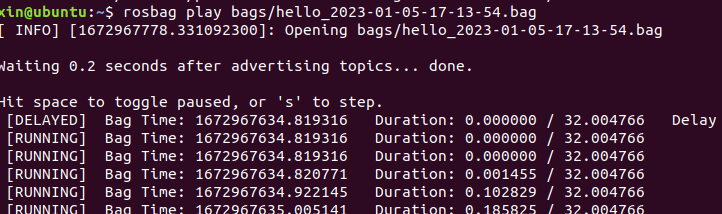
回放录制文件
rosbag play 路径/文件名
rosbag play bags/hello.bag