梯度(gradient)相关
方向导数
方向导数是在函数定义域的内点对某一方向求导得到的导数,一般为二元函数和三元函数的方向导数。方向导数可分为沿直线方向和沿曲线方向的方向导数。
一元函数 $y=f(x) $中,导数指函数在$(x_{0},y_{0})$点的变化率,即自变量改变 $Δx$ ,$y $变化的速率。
那么二元函数中的导数又是什么样的呢?以函数$z=f(x,y)$为例,它的导数可以理解成函数在$(x_{0},y_{0},z_{0})$ 点的变化率,即自变量x,y分别改变$\Delta x ,\Delta y$ ,$z$的变化速率。二元函数和一元函数不同的是,二元函数由于存在两个自变量,$\Delta x ,\Delta y$ 变化比例的不同会将导致$z $的变化速率不同,由此引出了方向导数的概念。导数具体的方向就由
自变量x和y在XOY平面上分别变化$\Delta x ,\Delta y$自变量x和y在XOY平面上分别变化$\Delta x ,\Delta y$便构成所谓的方向向量$e_{l}$
$(\Delta x,\Delta y)$ (这里一定要理解方向向量的概念),函数z沿着该方向变化的速率就是方向导数。由于方向向量的模为1,
$e_l$可以表示为$(cos\alpha,sin\alpha)$ , 其中$\alpha$ 是$e_l$ 与轴的夹角。便构成所谓的方向向量$e_{l}$$(\Delta x,\Delta y)$(这里一定要理解方向向量的概念),函数z沿着该方向变化的速率就是方向导数。由于方向向量的模为1, $e_l$可以表示为$(cos\alpha,sin\alpha)$ , 其中$\alpha$是$e_l$与轴的夹角。
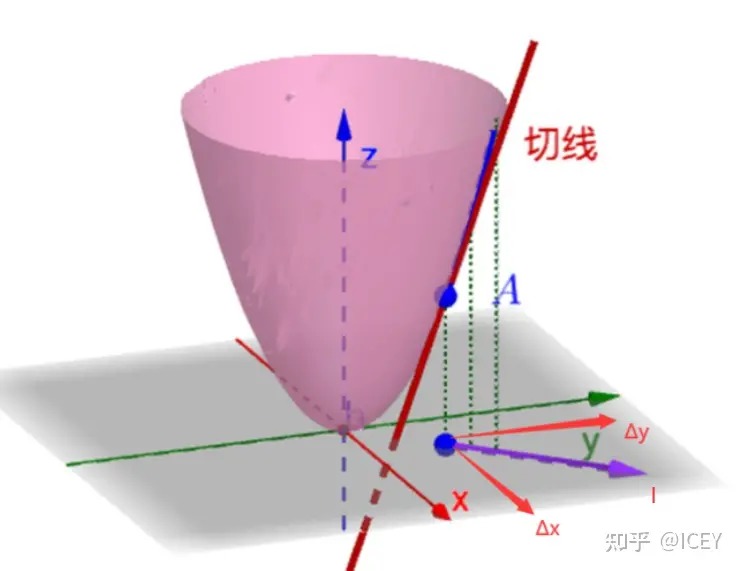
这里,我们可以对该方向向量做一个垂直于平面xoy的平面并与平面z相交于一条曲线,此时二维的方向导数便可降维成一维的导数来理解。
梯度(gradient)
梯度是场论里的一个基本概念。所谓“场”, 它表示空间区域上某种物理量的一种分布。从数学上看,这种分布常常表示为 2 上的一种数值函数或向量函数。能表示为数值函数u=u (x,y,z) 的场,称为数量场,如温度场、密度场等。
梯度的本意是一个向量(矢量), 表示某一函数在该点处的方向导数沿着该方向取得最大值,即函数在该点处沿着该方向(此梯度的方向)变化最快,变化率最大(为该梯度的模)。
梯度是雅可比矩阵的一种特殊形式,当m=1时函数的雅可比矩阵就是梯度,这个概念原是为场论设定的,任何场都可以用来理解梯度。
后来被引用到数学中用来指明函数在指定点的变量率最快的方向和大小,是一种变化效率的数字抽象。
几何含义
在数学和计算机图形学中,梯度表示函数在给定点处的变化率和方向。它是一个向量,其中每个分量表示函数在相应坐标轴上的偏导数。
几何上,梯度可以被解释为函数在给定点处的最陡增长方向。在二维空间中,梯度向量指向函数值增加最快的方向。在三维空间中,梯度向量指向函数值增加最快的方向,并且其大小表示函数值增加的速率。
梯度在计算机图形学和计算机视觉中具有广泛应用。例如,在图像处理中,可以利用图像的梯度信息来进行边缘检测和图像增强。在计算机图形学中,梯度可以用于计算光照、法线和纹理等信息,从而实现真实感渲染和表面细节的模拟。
总之,梯度在几何中表示函数变化的方向和速率,是许多数学和计算机领域中重要的概念。
梯度下降法(Gradient Descent)
梯度下降法是一种常用的优化算法,用于求解函数的最小值或最大值。其核心思想是通过迭代的方式,沿着函数的负梯度方向逐步更新参数,从而逐渐接近最优解。
梯度下降法的原理如下:
-
定义目标函数: 首先,需要定义一个目标函数,即待优化的函数。需要明确定义一个目标函数,也称为损失函数或代价函数。该函数的输入是参数的向量(例如,模型的权重和偏置),输出是该参数向量对应的损失值。目标函数的选择取决于具体的优化问题,例如最小二乘法中的平方损失函数、逻辑回归中的对数损失函数等。通常,该函数是一个关于参数的多元函数,例如 $f(x_1, x_2, ..., x_n)$。
-
初始化参数: 在开始优化之前,需要对参数进行初始化。通常情况下,参数会被初始化为随机值或者某种启发式方法得到的初始值。随机初始化参数的初始值,例如 $x_1 = x_2 = ... = x_n = 0$。这些参数是优化过程中需要不断调整的变量。
-
计算梯度: 计算目标函数关于参数的梯度(导数),即函数在当前参数值处的变化率。梯度表示了函数在该点上升或下降最快的方向。梯度的计算可以使用解析方法(解析导数)或数值方法(数值差分)。
-
更新参数: 沿着梯度的反方向更新参数的值,使目标函数值逐渐减小。参数的更新公式如下:
$ x_{new} = x_{old} - learning_{rate} * gradient$
其中,$x_{new} $是更新后的参数值,$x_{old} $是当前的参数值,$learning_{rate}$是学习率(步长),$gradient $是梯度。
其中,学习率是一个超参数,控制参数更新的步长。较大的学习率可以加快收敛速度,但可能导致错过最优解,可能导致参数在最优解附近震荡或无法收敛;较小的学习率可以提高收敛的稳定性,但会增加训练时间。
-
重复迭代: 重复执行步骤3和步骤4,直到满足停止条件。停止条件可以是达到最大迭代次数、目标函数值的变化小于某个阈值、梯度的模长小于某个阈值等。
-
输出结果: 在优化过程结束后,获得最优的参数值作为优化结果。这些参数可以用于后续的预测、分类、回归等任务。
通过不断迭代更新参数,梯度下降法能够在合理的步长下逐渐接近目标函数的最优解。
梯度下降法在机器学习中被广泛应用,特别是在训练神经网络和深度学习模型时。通过不断地迭代和更新参数,梯度下降法可以逐步调整模型的参数,使其在训练数据上达到更好的拟合效果。同时,梯度下降法也存在一些变体和改进的方法,如随机梯度下降法(Stochastic Gradient Descent,SGD)和批量梯度下降法(Batch Gradient Descent),用于加速优化过程和处理大规模数据集。
图像处理
在边缘检测中,梯度的方向和大小提供了图像中边缘的信息。边缘通常是图像中灰度或颜色值发生突变的地方。通过检测梯度的变化,可以找到图像中的边缘位置,并对其进行标记或分割。
在图像增强中,可以利用梯度信息来增强图像的细节和纹理。通过增加梯度的强度或将梯度作为权重,可以调整图像中不同区域的对比度和清晰度,从而使图像更加鲜明和有吸引力。
总而言之,梯度在图像处理中是一种有用的工具,可以用于边缘检测、图像增强和其他相关的计算机视觉任务,帮助分析和处理图像中的结构和特征。
在图像处理中,梯度可以用于边缘检测和图像增强的目的。
下面是两种常见的梯度算法在图像处理中的应用:
Sobel算子
Sobel算子是一种常用的边缘检测算子,用于在图像中检测边缘的位置和方向。它基于图像中像素值的梯度变化来确定边缘的位置。Sobel算子可以分别计算图像中每个像素点的水平和垂直方向上的梯度,并根据梯度的大小和方向来确定边缘。
Sobel算子的原理如下:
-
定义Sobel算子模板: Sobel算子通过应用特定的卷积模板来计算梯度。通常使用3x3的卷积模板,分别用于计算水平和垂直方向上的梯度。
水平方向的Sobel模板:
-1 0 1 -2 0 2 -1 0 1垂直方向的Sobel模板:
-1 -2 -1 0 0 0 1 2 1 -
对图像应用Sobel算子: 将Sobel算子模板与图像进行卷积操作。对于每个像素点,将模板与其周围的像素进行乘积运算,并将结果相加,得到该像素点在水平和垂直方向上的梯度值。
-
计算梯度大小和方向: 根据水平和垂直方向上的梯度值,可以计算每个像素点的梯度大小和方向。梯度大小可以通过求平方和开方的方式得到,即 $magnitude = sqrt(g_x^2 + g_y^2) $。梯度方向可以通过求反正切的方式得到,即 $angle = atan2(g_y, g_x) $。
-
阈值化处理: 根据梯度大小和方向,可以将图像中的像素点分为边缘和非边缘。常用的方法是设定一个阈值,将梯度值大于阈值的像素点标记为边缘点,否则标记为非边缘点。
Sobel算子的优点是简单且计算速度快,能够检测出图像中的边缘。然而,Sobel算子也存在一些局限性,例如对噪声敏感、边缘粗糙等。因此,在实际应用中,通常会结合其他边缘检测算法和图像处理技术来进行更精确的边缘检测和图像增强。
Laplacian算子
Laplacian算子是一种常用的图像增强和边缘检测算子,用于检测图像中的变化和边缘。与Sobel算子不同,Laplacian算子是通过计算图像的二阶导数来确定图像的变化和边缘。
Laplacian算子的原理如下:
-
定义Laplacian算子模板: Laplacian算子使用一个二阶导数的离散近似来计算图像中像素的变化。常用的Laplacian算子模板如下:
0 1 0 1 -4 1 0 1 0在模板中,中心像素的权重为-4,周围的四个像素(上、下、左、右)的权重为1,而对角线的四个像素的权重为0。
-
对图像应用Laplacian算子: 将Laplacian算子模板与图像进行卷积操作。对于每个像素点,将模板与其周围的像素进行乘积运算,并将结果相加,得到该像素点的拉普拉斯值。
-
阈值化处理: 根据拉普拉斯值可以确定图像中的变化和边缘。通常,可以设定一个阈值,将拉普拉斯值大于阈值的像素点标记为边缘点,否则标记为非边缘点。
Laplacian算子可以用于图像增强和边缘检测。在图像增强方面,Laplacian算子可以突出图像中的细节和纹理。在边缘检测方面,Laplacian算子可以检测图像中的边缘,但由于其对噪声敏感,通常需要与其他技术(如阈值化、高斯滤波)结合使用,以提高边缘检测的准确性和稳定性。
需要注意的是,Laplacian算子对于灰度图像的边缘检测效果较好,但在彩色图像中会导致边缘模糊。因此,在彩色图像中通常需要将图像转换为灰度图像后再应用Laplacian算子。此外,为了增强边缘,通常还会对图像进行平滑处理(如高斯滤波)以减少噪声的影响。
