配置 lidar ros package
1.新建文件夹(自己定义文件夹名字)
mkdir catkin
2.然后在catkin中新建src文件夹
mkdir src
3.将你的Delta-1A-ros拷贝到src文件夹中
4.新建终端,进入创建的catkin文件夹
cd lidar
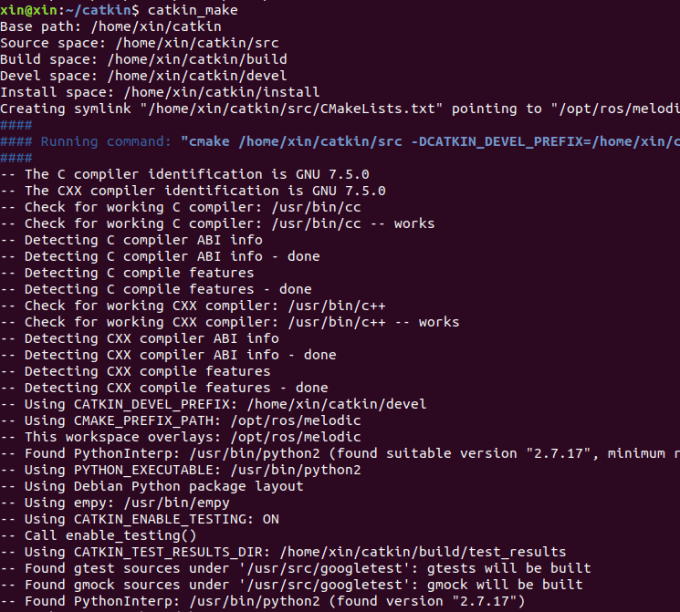
5.在当前终端中,执行命令
catkin_make
6.配置工作环境
source devel/setup.bash

7.连接雷达
sudo chmod 777 /dev/ttyUSB0

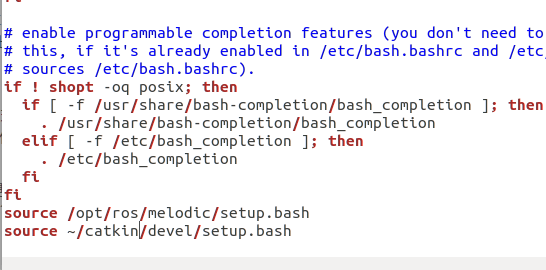
8.修改配置文件,执行命令
gedit ~/.bashrc
 在最后添加
在最后添加
source ~/catkin/devel/setup.bash
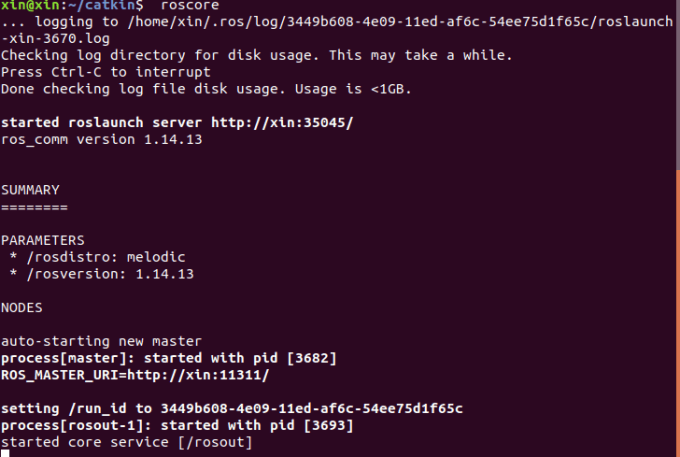
9.新建终端,输入命令
roscore
 运行lidar ros package
运行lidar ros package
1.运行publish_node
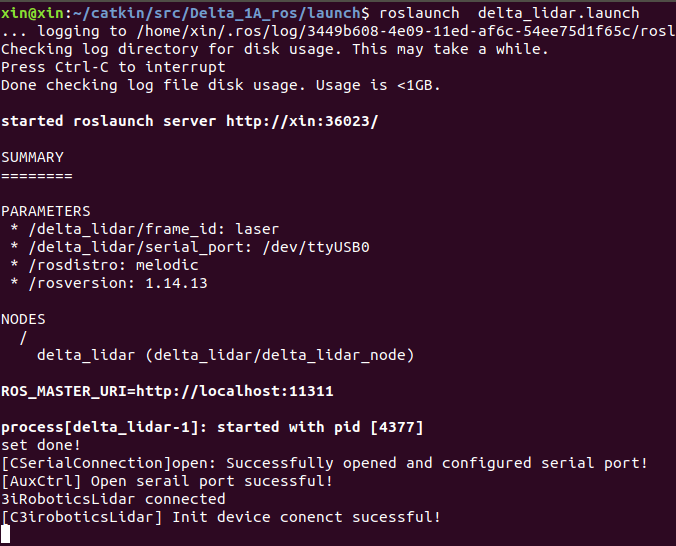
新建终端,进入catkin/src/Delta_1A_ros/launch/文件夹,执行命令
roslaunch delta_lidar.launch
2.运行subscribe_node
新建终端,执行命令
source devel/setup.bash
rosrun delta_lidar delta_lidar_node_client
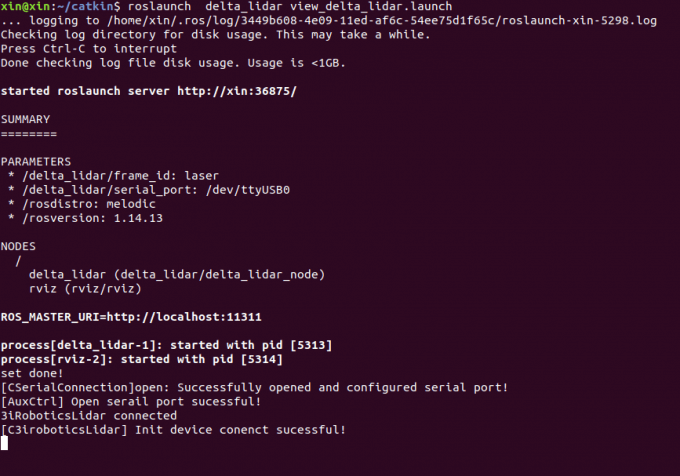
 运行lidar rviz
运行lidar rviz
新建终端,执行命令
roslaunch delta_lidar view_delta_lidar.launch