1.创建工作空间并初始化
mkdir -p 自定义工作空间名称/src
cd 自定义空间名称
catkin_make
这里我命名工作空间名称为**hello**
2.进入 src 创建 ros 包并添加依赖
cd src
catkin_create_pkg 自定义ROS包名 roscpp rospy std_msgs
上述命令,会在工作空间下生成一个功能包,该功能包依赖于 roscpp、rospy 与 std_msgs,其中roscpp是使用C++实现的库,而rospy则是使用python实现的库,std_msgs是标准消息库,创建ROS功能包时,一般都会依赖这三个库实现。

C++运行效率高但是编码效率低,而Python则反之,但是具体选择哪种语言,需要视需求而定。
3.进入 ros 包的 src 目录编辑源文件

4.在当前文件夹下生成c++文件
gedit hello_c.cpp
C++源码实现
#include "ros/ros.h"
int main(int argc, char *argv[])
{
//执行 ros 节点初始化
ros::init(argc,argv,"hello");
//创建 ros 节点句柄(非必须)
ros::NodeHandle n;
//控制台输出 hello world
ROS_INFO("hello world!");
return 0;
}
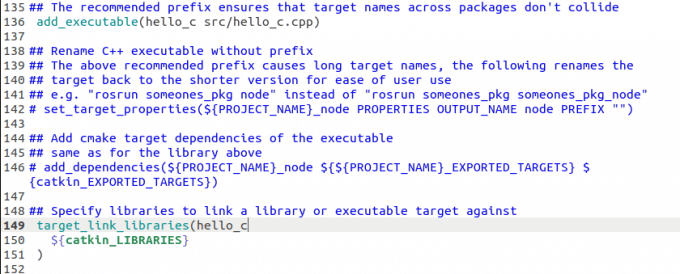
5.编辑 ros 包下的 Cmakelist.txt文件
cd ..
找到136行与149行修改
add_executable(步骤4的源文件名
src/步骤4的c++源文件名.cpp
)
target_link_libraries(步骤4的源文件名
${catkin_LIBRARIES}
)
6.进入工作空间目录并编译
cd cd 自定义工作空间名称
catkin_make
7.执行
roscore
再新建终端
cd 工作空间
source ./devel/setup.bash
rosrun 包名 C++节点

