安装
一般只要你安装的是desktop-full版本就会自带工具箱 如果需要安装可以以如下方式安装
sudo apt-get install ros-noetic-rqt
sudo apt-get install ros-noetic-rqt-common-plugins
启动
//方式1
rqt
//方式2
rosrun rqt_gui rqt_gui
基本使用
运行小乌龟节点
roscore
rosrun turtlesim turtlesim_node
运行Rqt工具箱
qrt
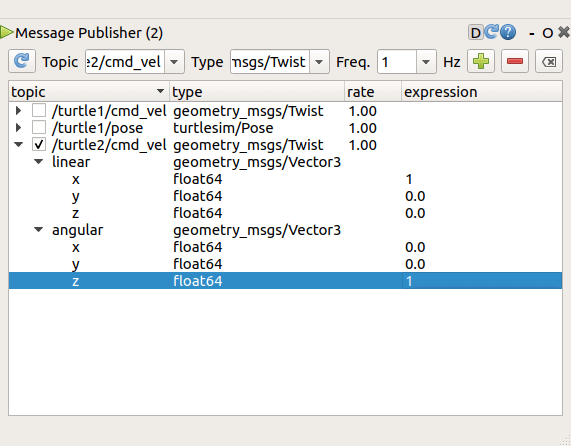
选择小乌龟运动节点,点击右上角添加话题
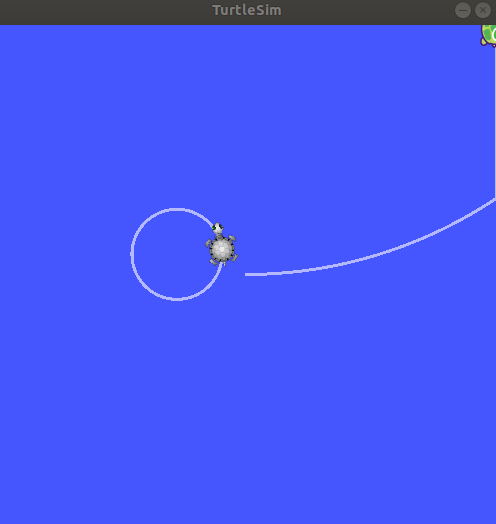
实现1:实现小乌龟运动
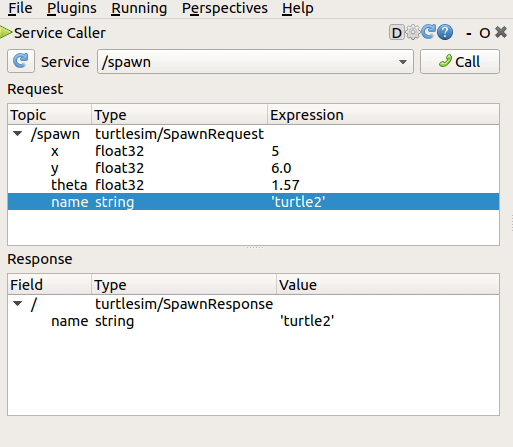
实现2:实现小乌龟生成