需求
在 Rviz 中显示一个盒状机器人 实现流程 准备:新建功能包,导入依赖 核心:编写 urdf 文件 核心:在 launch 文件集成 URDF 与 Rviz
实现流程
创建功能包
创建一个新的功能包,名称自定义,导入依赖包:urdf与xacro
在当前功能包下,再新建几个目录:
urdf: 存储 urdf 文件的目录
meshes:机器人模型渲染文件(暂不使用)
config: 配置文件
launch: 存储 launch 启动文件
编写 URDF 文件
<robot name="mycar">
<link name="base_link">
<visual>
<geometry>
<box size="0.5 0.2 0.1" />
</geometry>
</visual>
</link>
</robot>
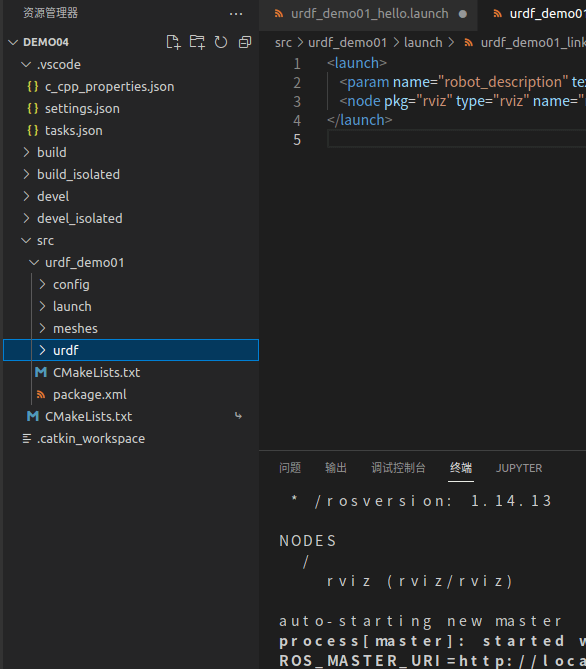
编写launch文件
<launch>
<!-- 设置参数 -->
<param name="robot_description" textfile="$(find 包名)/urdf/urdf/urdf01_HelloWorld.urdf" />
<!-- 启动 rviz -->
<node pkg="rviz" type="rviz" name="rviz" />
</launch>
启动launch文件
source ./devel/setup.bash
roslaunch urdf_demo01 urdf_demo01_hello.launch
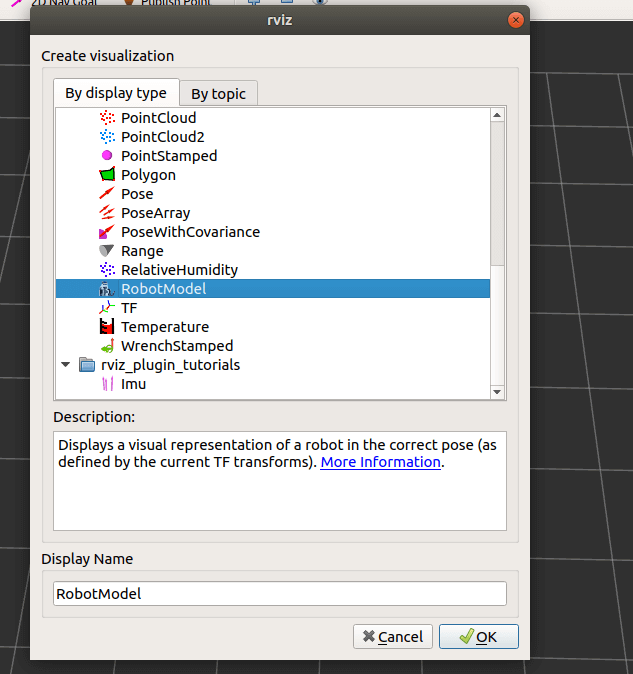
机器人模型导入
导入机器人模型
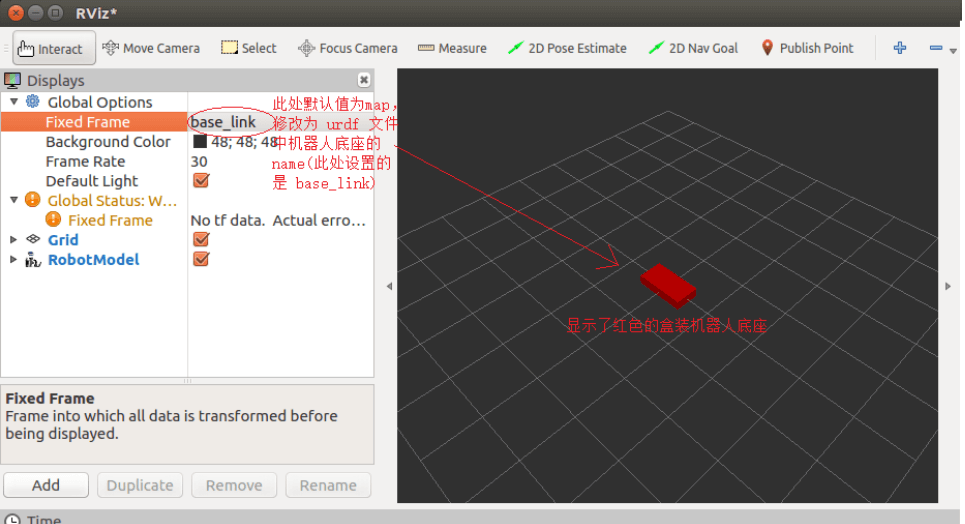
更改坐标系
 优化
优化
存在问题
rviz 启动后,会发现并没有盒装的机器人模型,这是因为默认情况下没有添加机器人显示组件,需要手动添加
保存配置文件
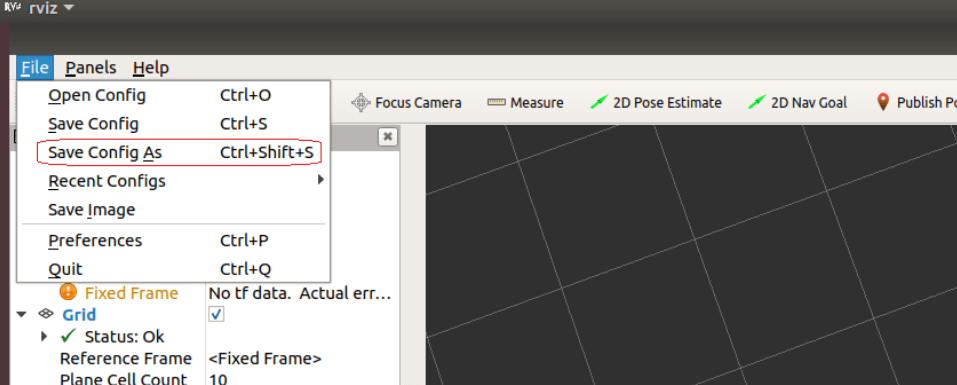
修改launch文件
在launch文件中添加配置文件路径
启动launch文件 source ./devel/setup.bash roslaunch urdf_demo01 urdf_demo01_hello.launch
