通讯协议
在连接雷达只想需要先确定雷达的通讯波特率,我这里的思岚S2波特率为1000000。
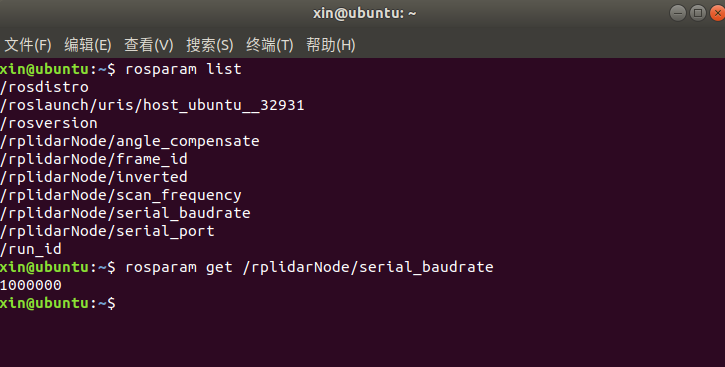
ubuntu下获取通讯波特率
//连接雷达
sudo chmod 777 /dev/ttyUSB0
//更新环境变量
source ./devel/setup.bash
//启动雷达
roslaunch rplidar_ros rplidar_s2.launch
//获取参数
rosparam list
//获取波特率
rosparam get /rplidarNode/serial_baudrate
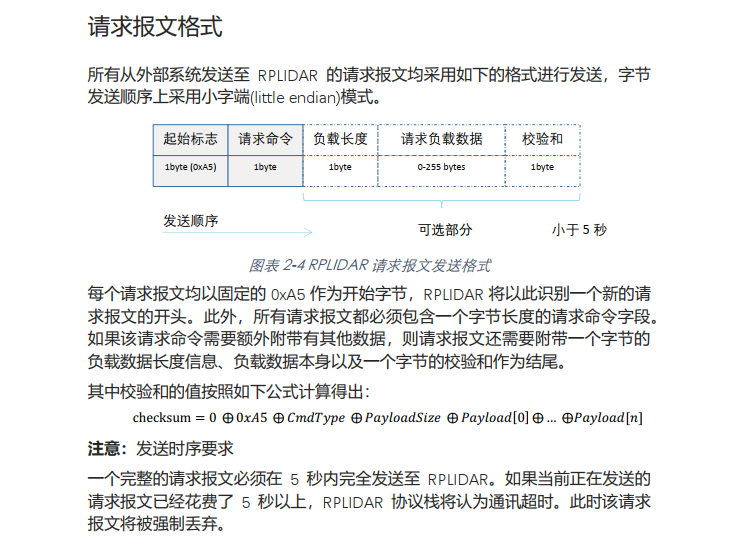
请求报文格式
在得到了雷达的通信波特率之后还需要知道如何与雷达通信,知道通信的命令。可以查询雷达的通讯协议,里面会有详细的讲解。
关键点:
1.起始报文必须是0XA5
2.必须在5秒内完成命令的发送
请求命令
命令格式:A5 + 命令
eg:A5 20 即为开始扫描

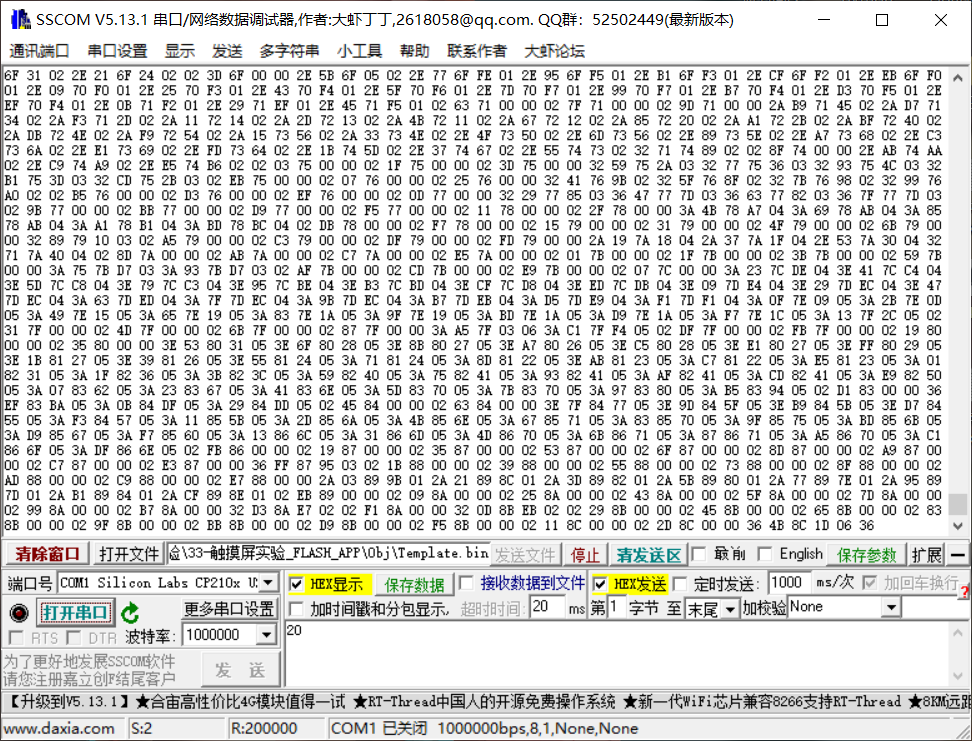
win连接雷达
- 将雷达连接至电脑并且打开串口调试助手
- 选择雷达所使用的端口,设置波特率为1000000
- 选择Hex发送,打开串口
- 在串口分别发送A5和20
- 串口接受到雷达信息
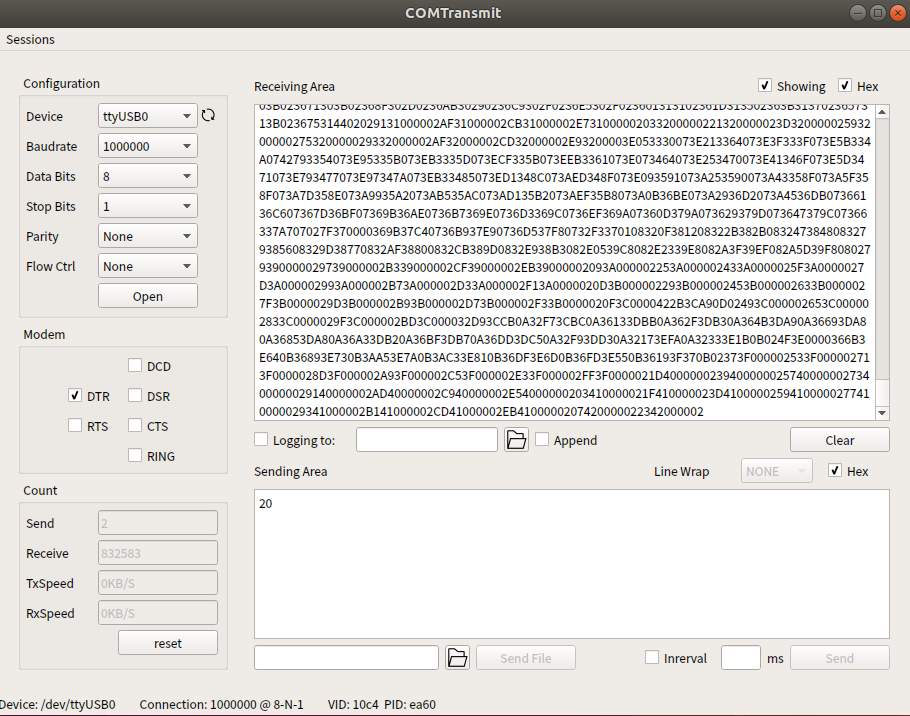
ubuntu连接雷达
使用串口接受雷达信息时,必须关闭所有雷达调用进程,防止端口占用
- 连接雷达
sudo chmod 777 /dev/ttyUSB0
- 打开串口调试工具COMTransmit_amd64_0.1.0.deb
- 设置波特率为1000000,选中雷达端口,勾选Hex格式
- 在发送区域分别发送A5和20
- 串口接受到雷达信息

此处评论已关闭