新建demo
新建package
新建cpp文件
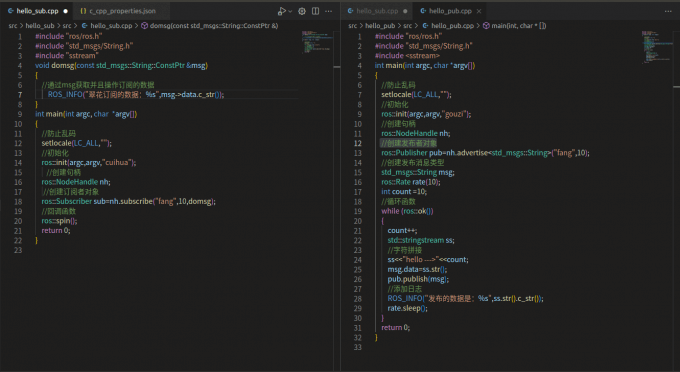
发布方函数
#include "ros/ros.h"
#include "std_msgs/String.h"
int main(int argc, char *argv[])
{
//初始化
ros::init(argc,argv,"gouzi");
//创建句柄
ros::NodeHandle nh;
//创建发布者对象
ros::Publisher pub=nh.advertise<std_msgs::String>("fang",10);
//创建发布消息类型
std_msgs::String msg;
//循环函数
while (ros::ok())
{msg.data="hello";
pub.publish(msg);
}
return 0;
}
订阅方函数
#include "ros/ros.h"
#include "std_msgs/String.h"
#include "sstream"
void domsg(const std_msgs::String::ConstPtr &msg)
{
//通过msg获取并且操作订阅的数据
ROS_INFO("翠花订阅的数据:%s",msg->data.c_str());
}
int main(int argc, char *argv[])
{
//防止乱码
setlocale(LC_ALL,"");
//初始化
ros::init(argc,argv,"cuihua");
//创建句柄
ros::NodeHandle nh;
//创建订阅者对象
ros::Subscriber sub=nh.subscribe("fang",10,domsg);
//回调函数
ros::spin();
return 0;
}
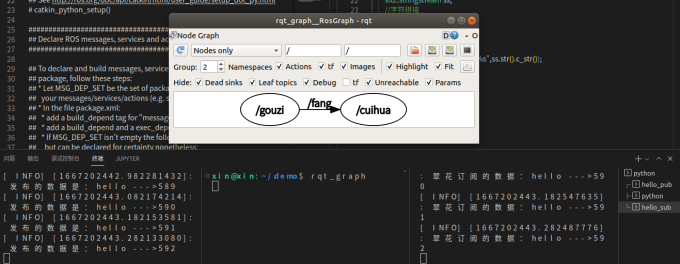
 启动节点
启动节点