直接设置参数
启动乌龟显示节点,并设置参数 A = 100
rosrun turtlesim turtlesim_node _A:=100
launch文件设置参数
<launch>
<!-- 全局>
<param name="radius" value="0.2" />
<node pkg="turtlesim" type="turtlesim_node" name="t1" ns="xxx">
<!-- 私有>
<param name="radius" value="0.08"/>
</node>
</launch>
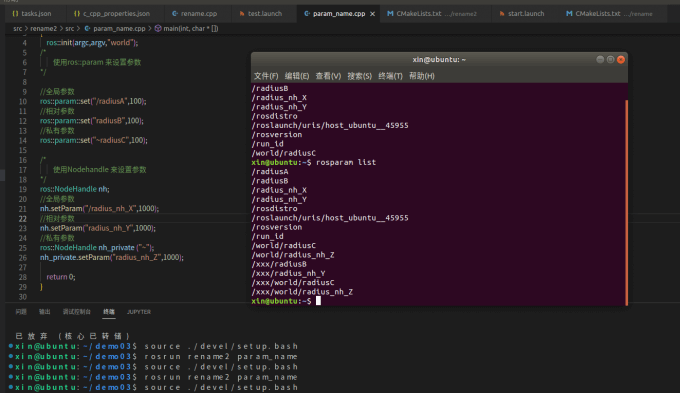
编码设置参数
#include "ros/ros.h"
int main(int argc, char *argv[])
{
ros::init(argc,argv,"world");
/*
使用ros::param 来设置参数
*/
//全局参数
ros::param::set("/radiusA",100);
//相对参数
ros::param::set("radiusB",100);
//私有参数
ros::param::set("~radiusC",100);
/*
使用Nodehandle 来设置参数
*/
ros::NodeHandle nh;
//全局参数
nh.setParam("/radius_nh_X",1000);
//相对参数
nh.setParam("radius_nh_Y",1000);
//私有参数
ros::NodeHandle nh_private ("~");
nh_private.setParam("radius_nh_Z",1000);
return 0;
}