Loading...
node参数 参数 pkg="包名" 节点所属的包 type="nodeT...
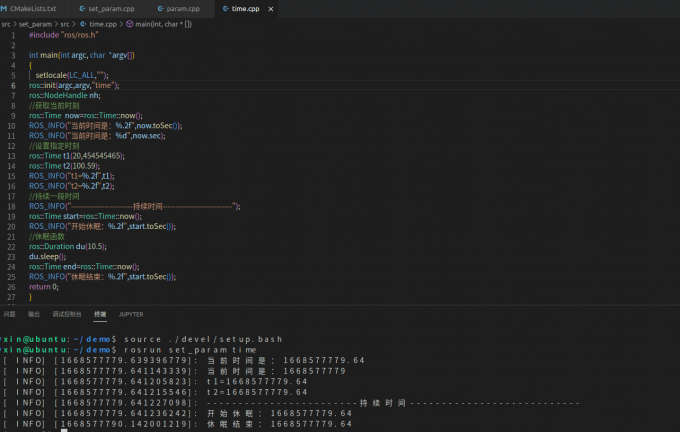
初始化函数 作用:初始化函数 ros::init(argc,argv,"节点名"...
增 创建新的ROS功能包 catkin_create_pkg 自定义包名 依赖包 安装 ROS...