Loading...
我使用ransac对存在噪声的点云进行匹配,为什么待匹配的点云发生了变换,这正常吗 在使用RANSA...
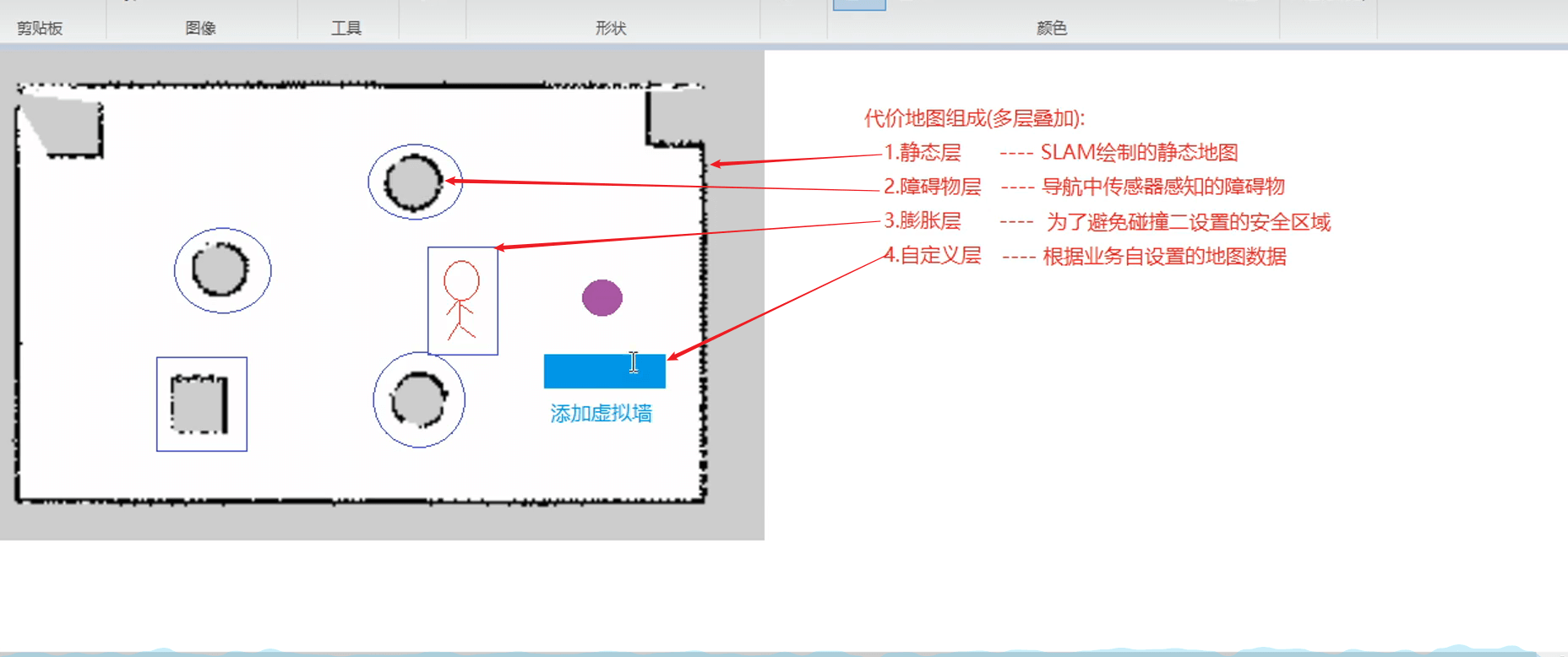
简介 场景:在 7.2.1 导航实现01_SLAM建图中,我们是通过键盘控制机器人移动实现建图的,而后续...
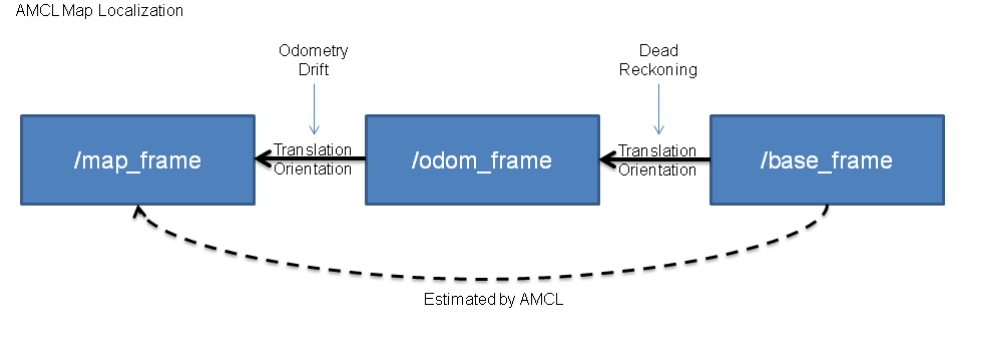
amcl简介 AMCL(adaptive Monte Carlo Localization) 是用于2D...