Loading...
简介 Gmapping是一个基于2D激光雷达使用RBPF(Rao-Blackwellized Parti...
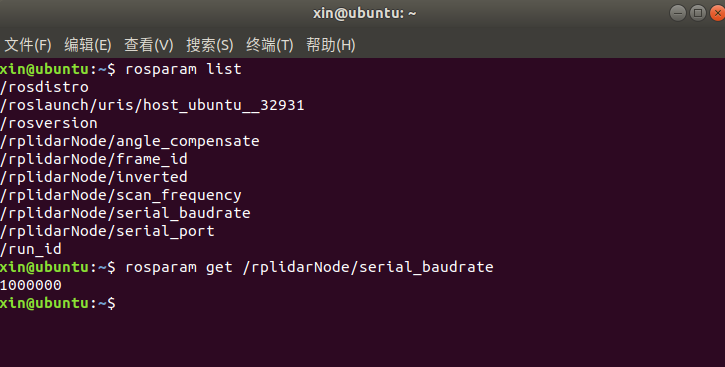
节点 rplidarNode主要是驱动雷达,通过读取雷达扫描的原始数据,使用封装的SDK转换雷达扫描到的...
硬件要求 hector_mapping是基于激光雷达的SLAM的节点,不需要里程计信息,适用于运算能力差...