Loading...
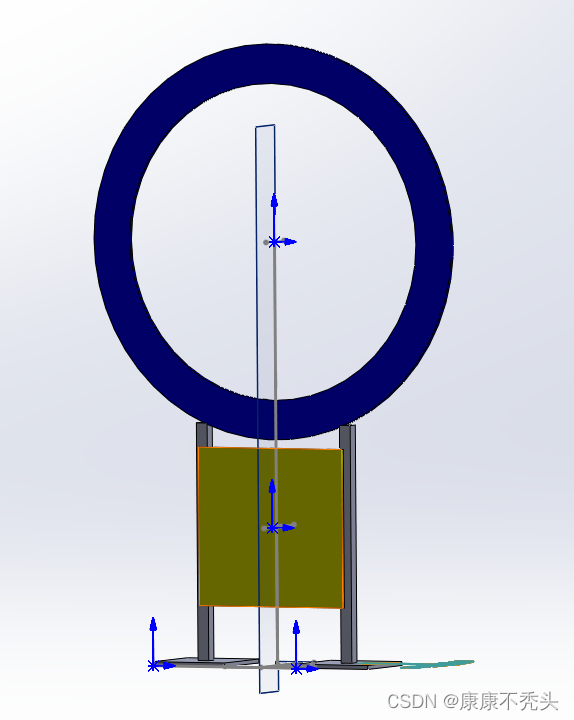
gazebo的模型库里已经有很多模型了,但是如果要制作自己的模型,还是在Solidworks上比较方便,...
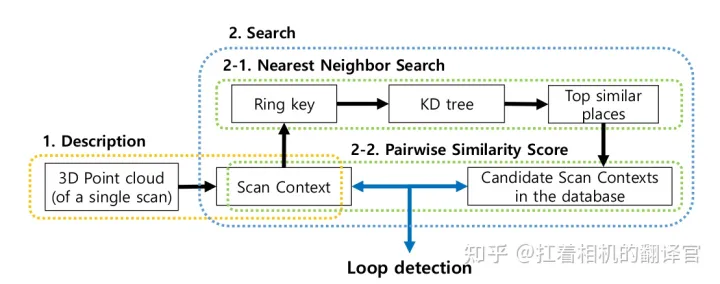
SLAM数学描述 SLAM过程可总结为两个基本方程: $ X_k=f(X_{k-1},U_k,W_k)...
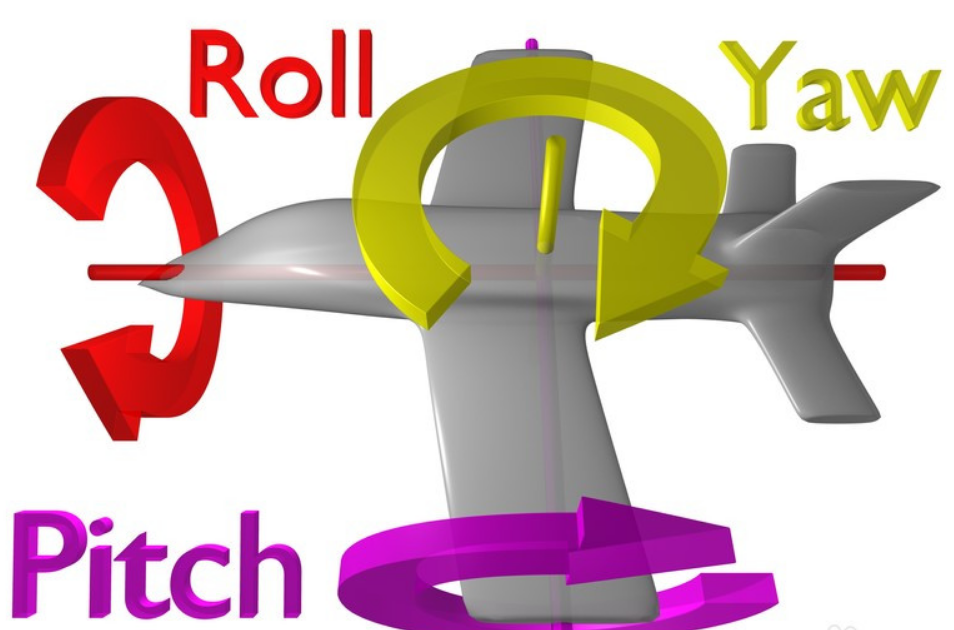
欧拉角 定义 无论是旋转向量还是旋转矩阵,虽然它们能描述旋转,但对我们人类来说是非常不...