Loading...
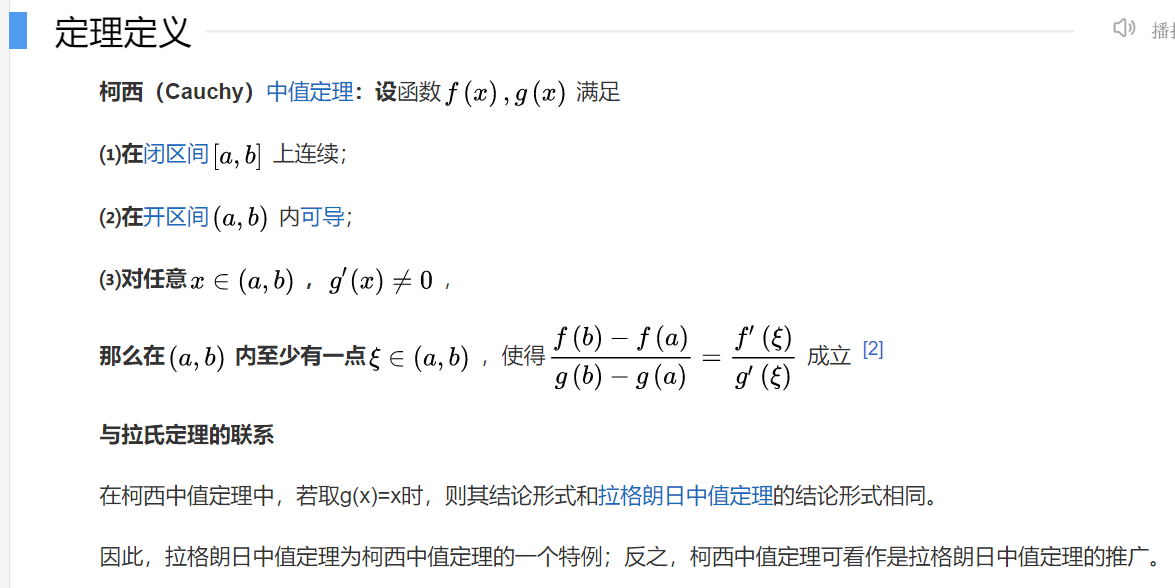
基础知识 拉格朗日中值定理 如果函数f(x)在闭区间上[a,b]连续,在开区间(a,b)上可导,那么在开...
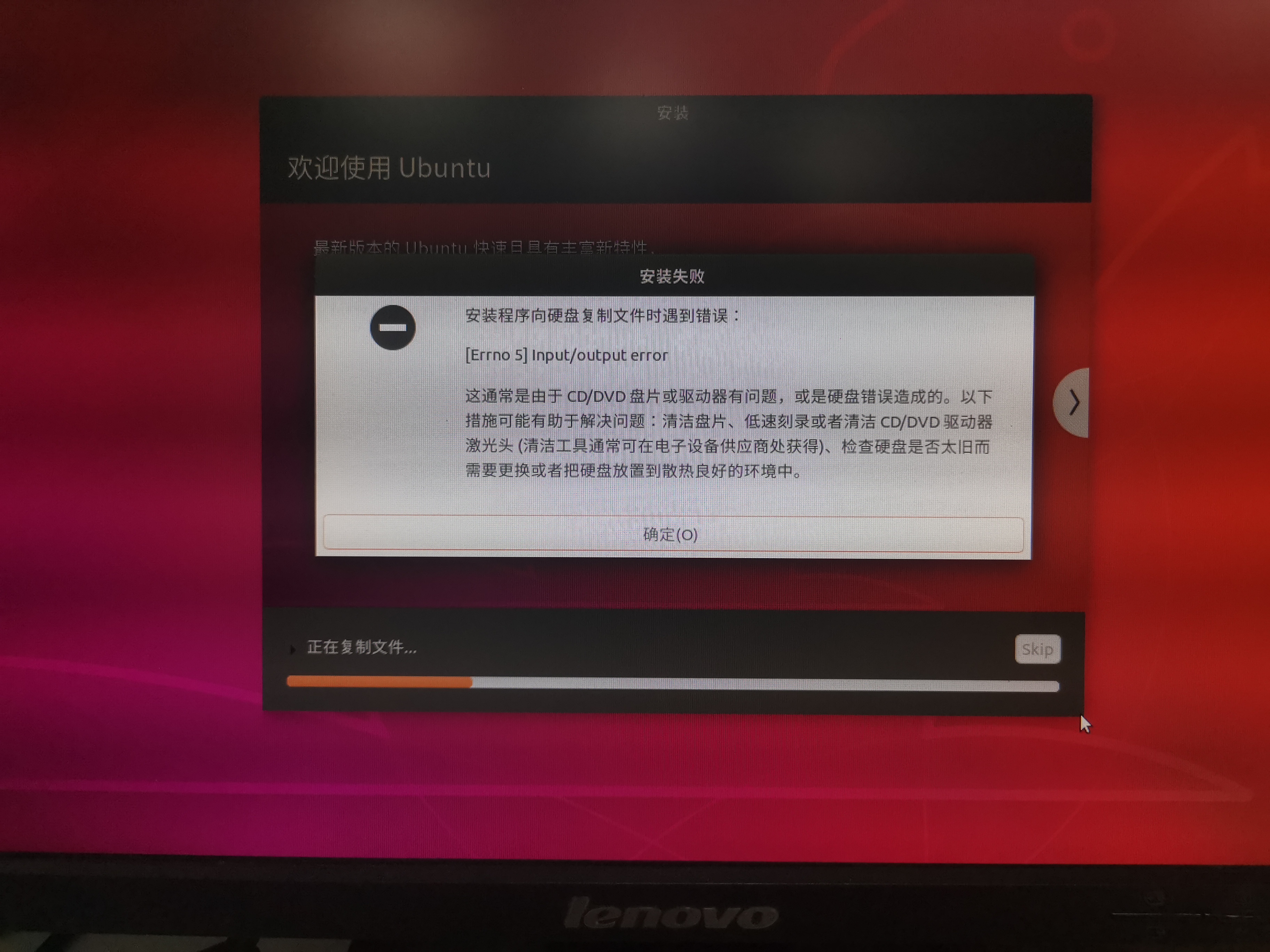
安装程序向硬盘复制文件时遇到错误: [Errno 5] Input/output error 此个别错...
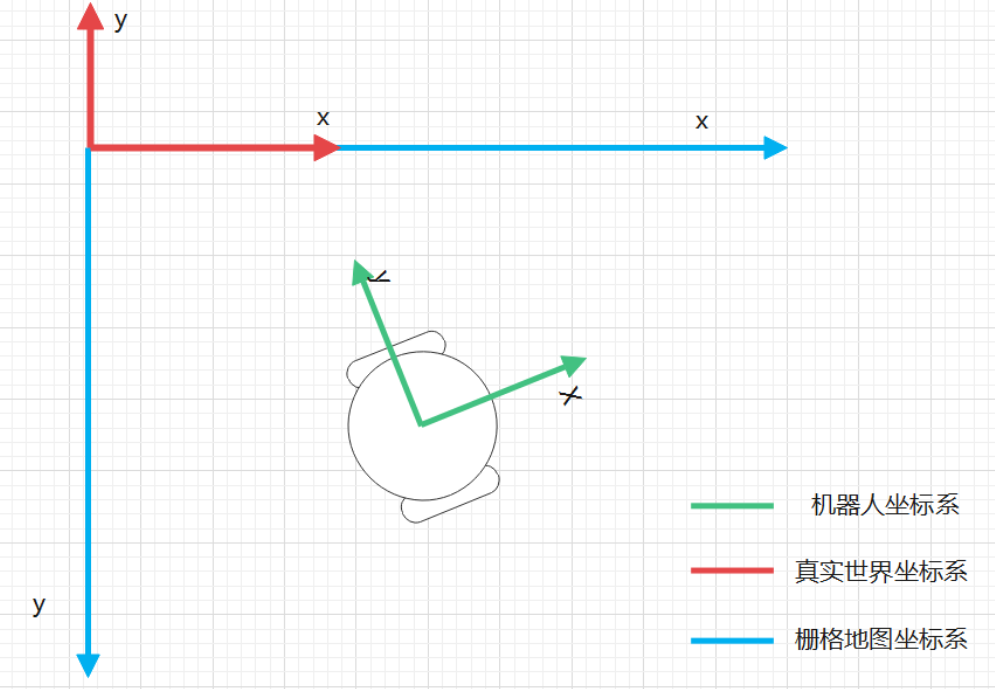
简介 Gmapping是一个基于2D激光雷达使用RBPF(Rao-Blackwellized Parti...