Loading...
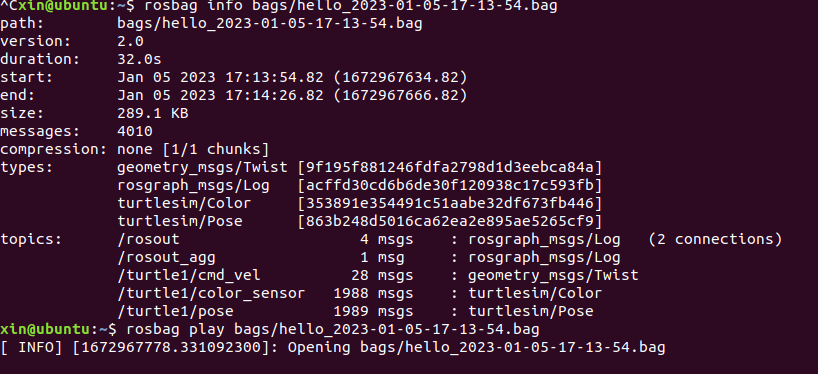
简介 ROS 内置的乌龟案例并操作,操作过程中使用 rosbag 录制,录制结束后,实现重放 操作过程 ...
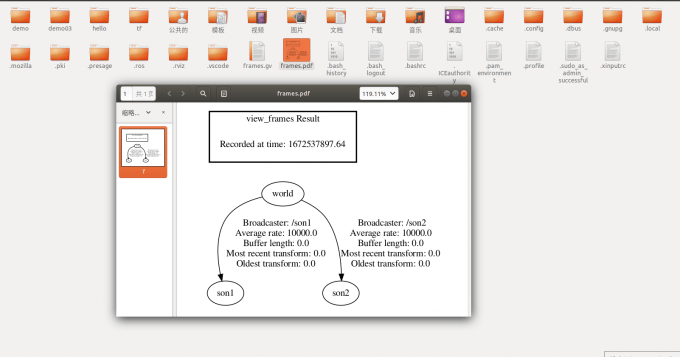
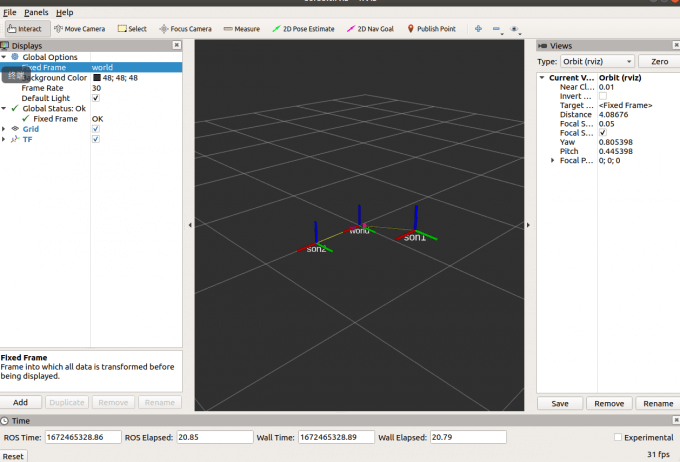
现有坐标系统,父级坐标系统 world,下有两子级系统 son1,son2,son1 相对于 world...
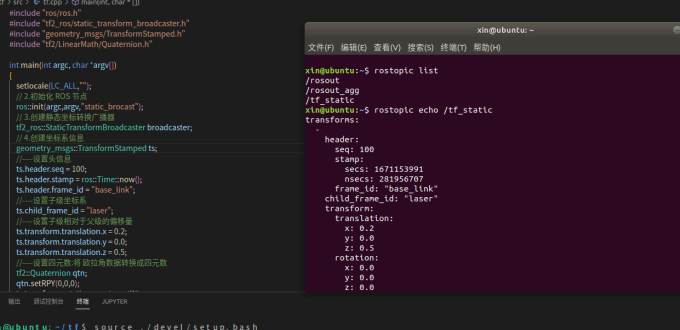
简介 静态坐标变换,是指两个坐标系之间的相对位置是固定的 需求描述 现有一机器人模型,核心构成包含主体与...