特征地图
简介
常见于vSLAM(视觉SLAM)技术中。它一般通过如GPS、UWB以及摄像头配合稀疏方式的vSLAM算法产生。
描述
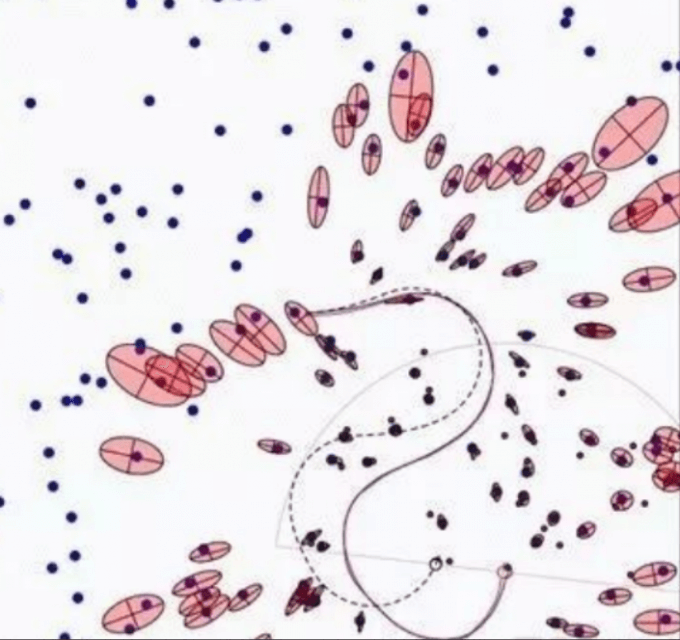
特征地图一般由点,线,面等一系列几何特征组成。特征地图用有关的几何特征(如点、直线、面)表示环境。
特点
1.具有计算量小,直观简单等优点,能够快速构建出具有结构化特征的地图。 2.无法利用常规的几何特征描述复杂的环境。 3.特征地图的精度严重依赖数据关联,在进行全局环境地图的更新时,需要不断地将局部地图与全局地图进行匹配,保证地图构建的一致性。若地图扫描匹配失败,会严重影响机器人的位姿估计以及机器人在全局地图中定位的精度。
拓扑地图
简介
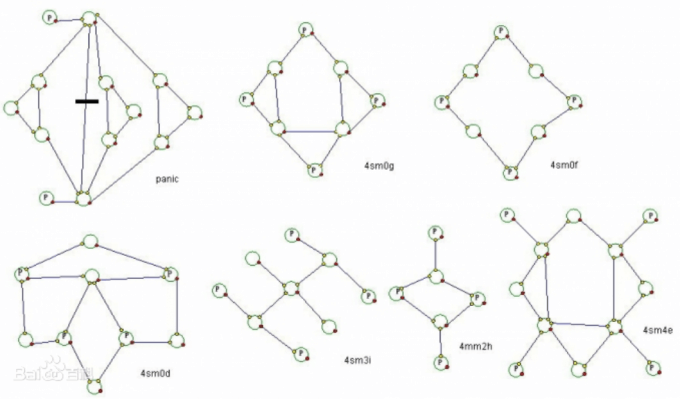
拓扑地图(topological map )是指地图学中一种统计地图,一种保持点与线相对位置关系正确而不一定保持图形形状与面积、距离、方向正确的抽象地图。 拓扑地图引入节点的概念描述地图中的重点区域,在此基础上利用线段与各节点相互连接的形式描述环境地图。该地图主要用于机器人的路径规划,通过结合成熟的搜索算法,能够高效的完成任务规划。
描述
拓扑地图把室内环境表示为带结点和相关连接线的拓扑结构图,其中结点表示环境中的重要位置点(拐角、门、电梯、楼梯等),边表示结点间的连接关系,如走廊等。栅格地图则是把环境划分成一系列栅格,其中每一栅格给定一个可能值,表示该栅格被占据的概率。
特点
1.拓扑地图严重依赖节点的识别匹配,对于存在相似特征的复杂室内环境,机器人很难快速的完成节点的识别,无法满足地图构造的一致性。 2.拓扑地图是高度抽象的表达方式,忽略了地图的细节特征,存在可读性较差等问题。
栅格地图
简介
栅格图像,也称光栅图像,是指在空间和亮度上都已经离散化了的图像。我们可以把一幅栅格图像考虑为一个矩阵,矩阵中的任一元素对应于图像中的一个点,而相应的值对应于该点的灰度级,数字矩阵中的元素叫做像素。
描述
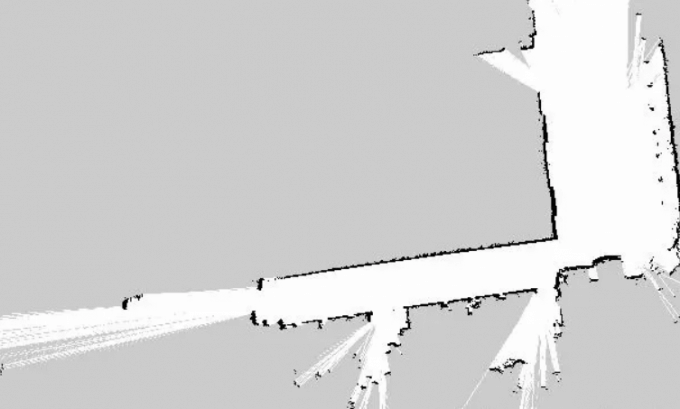
该方法将地图分解为一个个独立且相同大小的栅格单元,并且将各栅格赋予 0 到 1 之间的值,表示该栅格存在障碍物的概率值。
特点
栅格地图的创建不受地形的影响,通过改变栅格的状态值完成地图的更新。栅格地图的精准度主要与分辨率有关,提高分辨率会增加栅格单元的数量,同时也能更详细的描述环境信息。由于栅格地图便于维护及更新,能够将环境信息以数组的形式存储 在计算机中,便于开发者调用,且不包含过多冗余信息。
