启动小海龟
启动ROS Master
roscore
启动小海龟仿真器
rosrun turlesim turlesim_node
启动海龟控制节点
rousrun turlesim turtle_teleop_key
roscore
启动ROS Master,启动ROS必须先运行roscore
rosrun
运行某个功能包的某个节点
rosrun [功能包] 然后双击Tab键会将功能包下所有节点列出 rosrun 功能包 节点 rqt
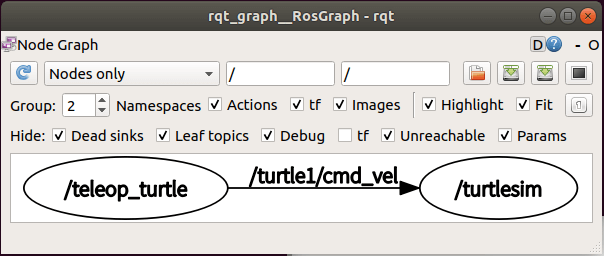
ROS内基于QT的可视化工具
rqt_graph--显示当前系统的结构图
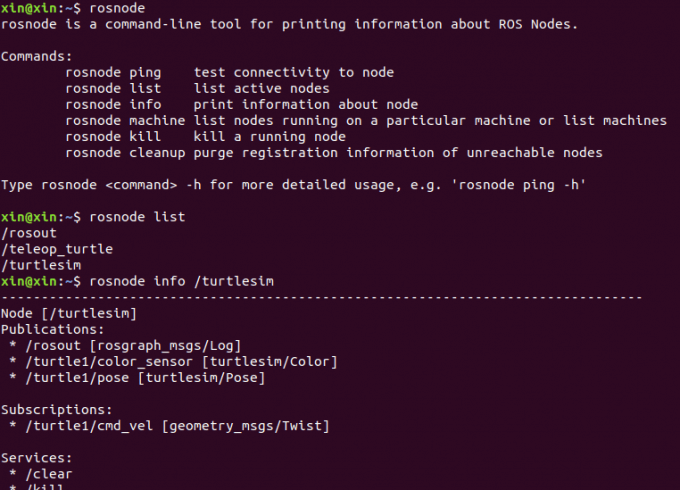
 rosnode
rosnode
按enter键查看参数
rosnode 参数 功能包
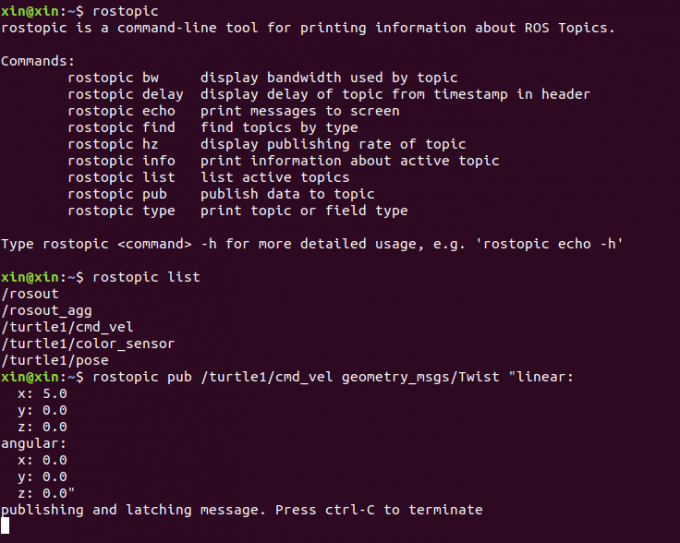
 rostopic
rostopic
查看当前项目的话题
rostopic list
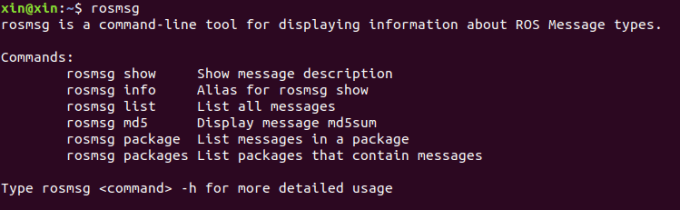
rosmsg
显示有关ROS的信息
参数如下
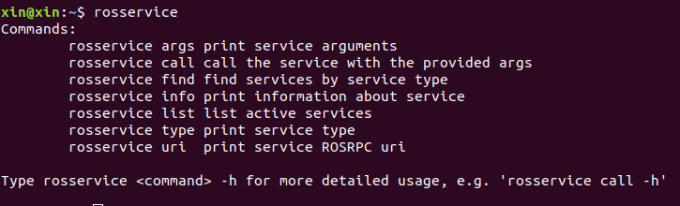
rosservice
参数如下
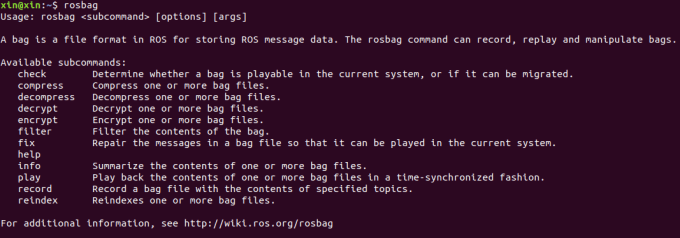
rosbag
参数如下
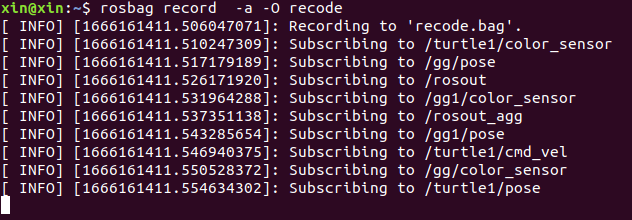
rosbag记录
rosbag播放

