hector坐标系
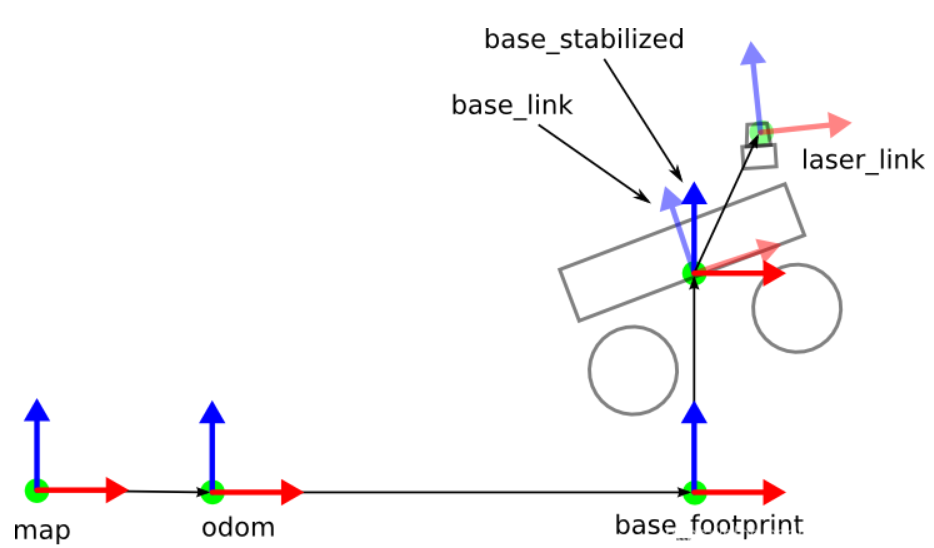
map
map的原点是指地图的原点
odom
odom 的原点是机器人的起始点,一般是由里程计运动模型提供的
会产生累计误差,而且累积误差是一直累加的,所以之后的行走中可以看到map和odom并不是一直重合,odom是会飘逸的
base_footprint
base_footprint指的是在平面上的坐标系,相当于小车base_link在二维平面的投影,二者相对静态
base_link
小车的基坐标系,相当于是整个小车的基座标,车上所有东西都相对它静止
base_stabilized
不随小车状态发生变化的位姿,相当于静止时刻小车基座标系状态
laser_link
源码里面为了发布map到odom,是先lookup了base到odom的变换,然后由hector算出的map到base,两个相乘得到map到odom之后再发布出来的