Loading...
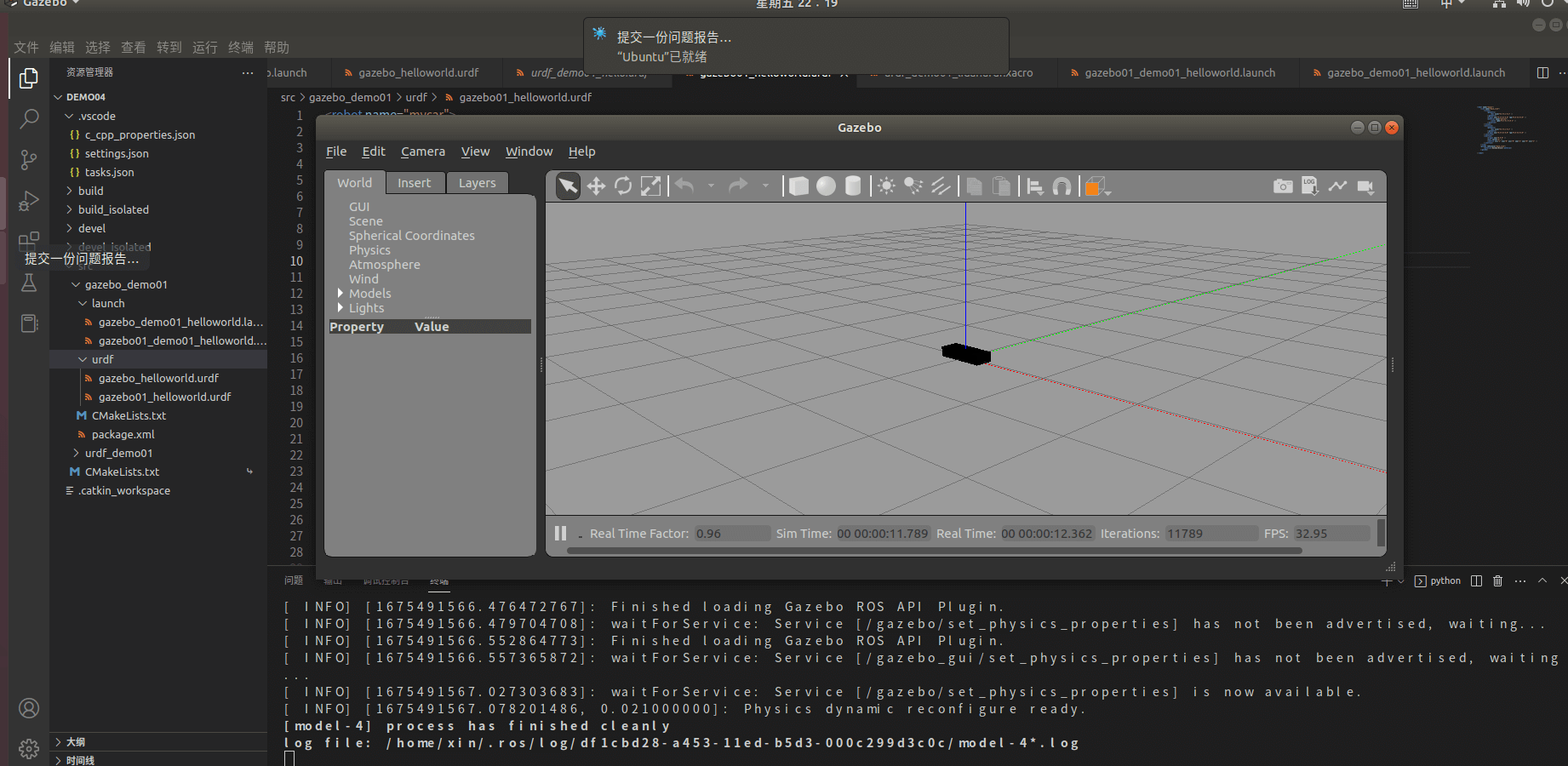
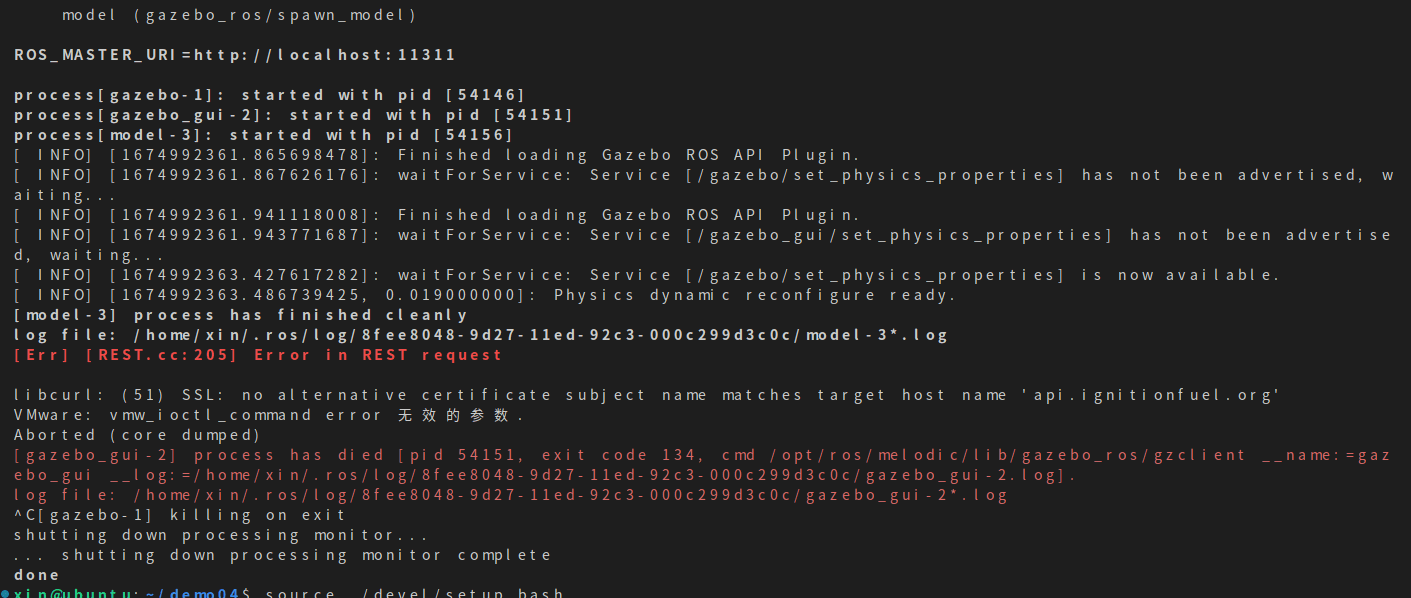
主要流程 URDF 与 Gazebo 集成流程与 Rviz 实现类似 主要步骤如下: 创建功能包,导入...
基本流程 安装 Arbotix 创建新功能包,准备机器人 urdf、xacro 文件 添加 ...
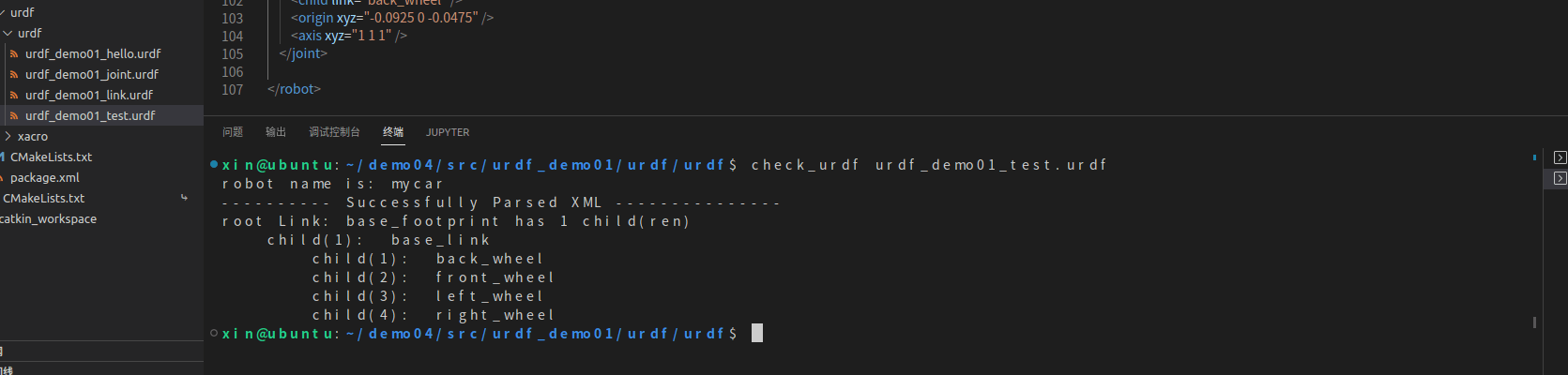
URDF语法检查工具 check_urdf命令可以检查复杂的 urdf 文件是否存在语法问题 使用步骤 ...