Loading...
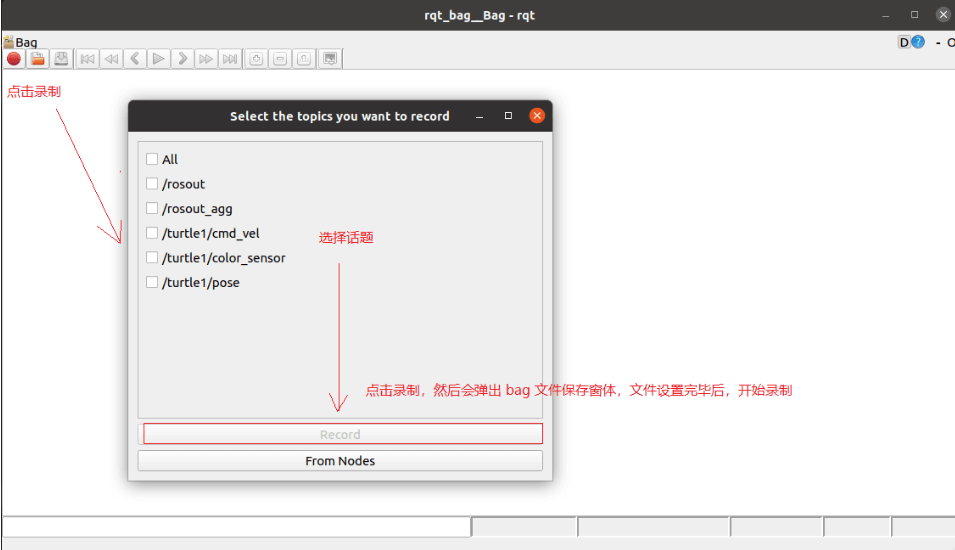
简介 录制和重放 bag 文件的图形化插件 准备 启动 turtlesim 乌龟节点与键盘控制节点 启动...
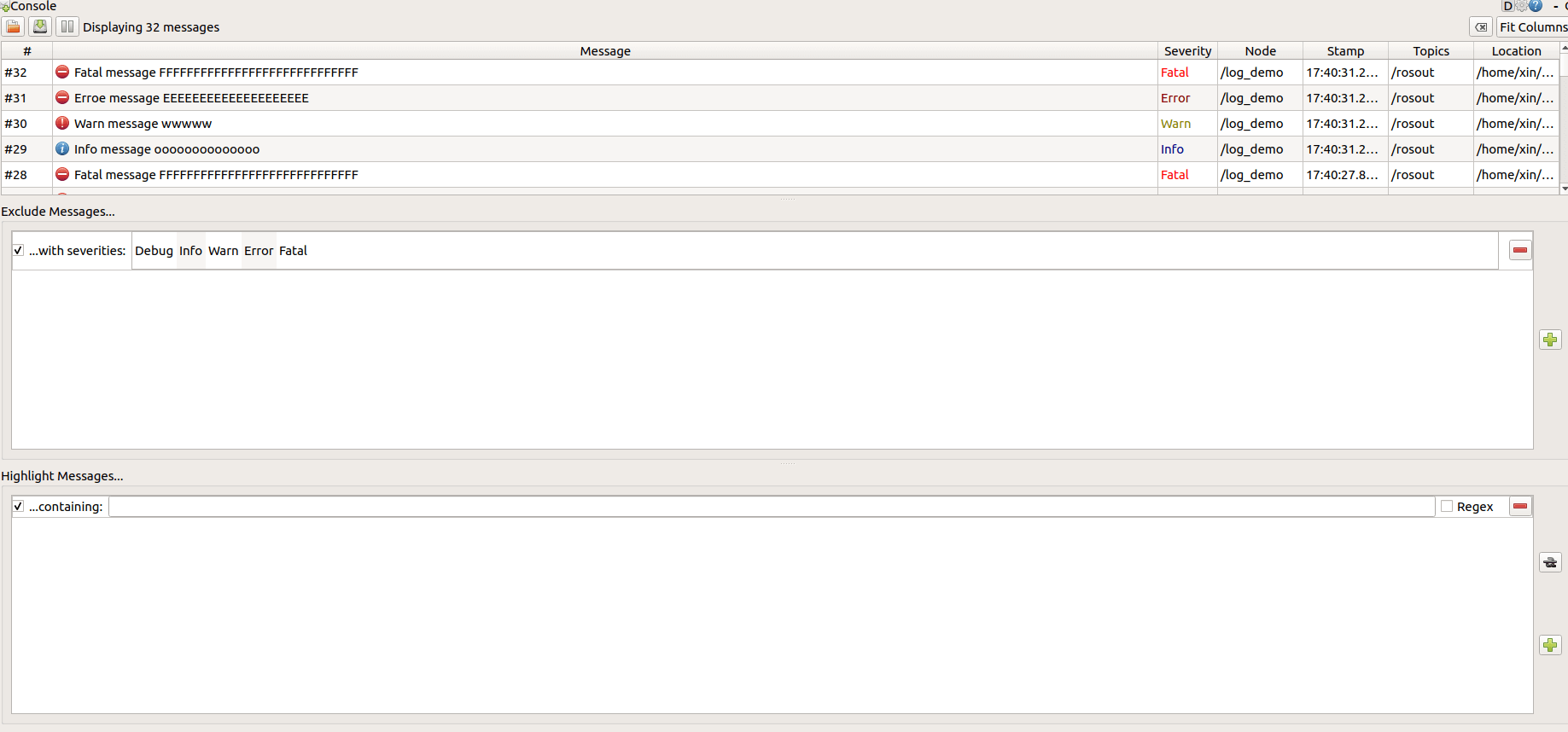
简介 rqt_console 是 ROS 中用于显示和过滤日志的图形化插件 基本使用 编写日志程序 ...
原因:咱不知晓!可能由于我是先修改配置配置文件并且在编译之后,重新对于文件进行名称的对调,代码无变化,...