Loading...
gmapping 基于粒子滤波的2D激光雷达SLAM,构建二维栅格地图。融合里程计信息,没有回环检测。 ...
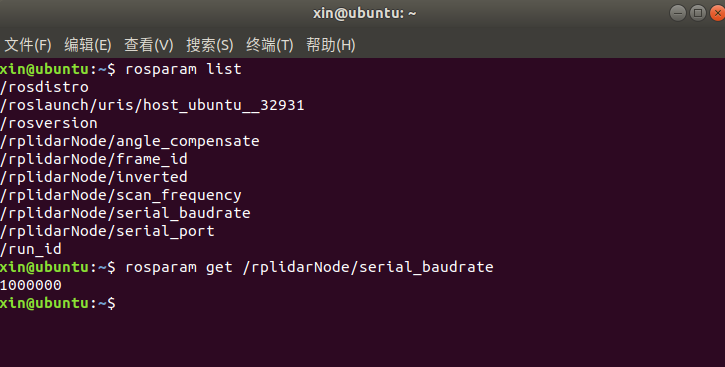
节点 rplidarNode主要是驱动雷达,通过读取雷达扫描的原始数据,使用封装的SDK转换雷达扫描到的...
硬件要求 hector_mapping是基于激光雷达的SLAM的节点,不需要里程计信息,适用于运算能力差...